Webマニュアル - TurtleBot3 Burger RSJ工学セミナー仕様
※キットの組立を開始する前にこのWebマニュアルをご一読ください。
※完成品をご購入の場合でも、ソフトウェアセットアップ時に追加で作業が必要になります。詳細は下記の「ソフトウェアセットアップ」の項目を参照してください。
※このマニュアルの内容はセミナー仕様TURTLEBOT3 Burger(キット・完成品)に適用されるものです。
ハードウェアセットアップ(作業上の注意 - 致命的な失敗を避けるために)
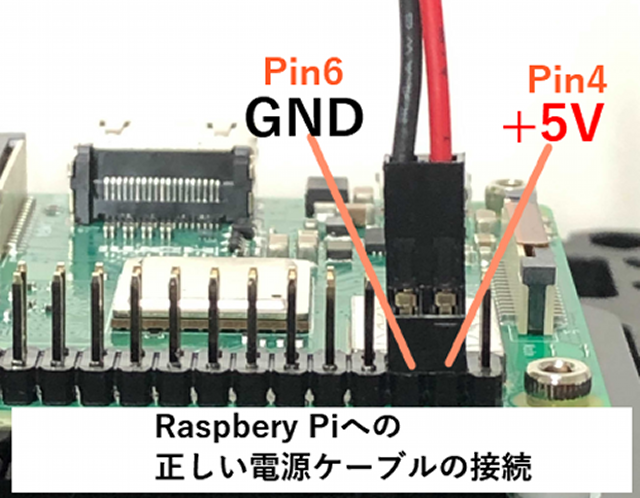
TURTLEBOT3 Burger Assembly Manual P22のRaspberyPiのGPIO端子へのOpenCR1.0からの電源供給ケーブル接続は、コネクタを挿す位置、向きを間違えやすい作業です。この接続を間違えた場合、RaspberyPiと制御ボードOpenCR1.0が電気的に破損し二度と使えなくなることがあります。作業には細心の注意を払ってください。
ハードウェアセットアップ(Assembly Manual差分)
【OpenCR1.0の取り付け】
TURTLEBOT3 Burger Assembly ManualのP16 ~ P18を次のように読み替えてください。
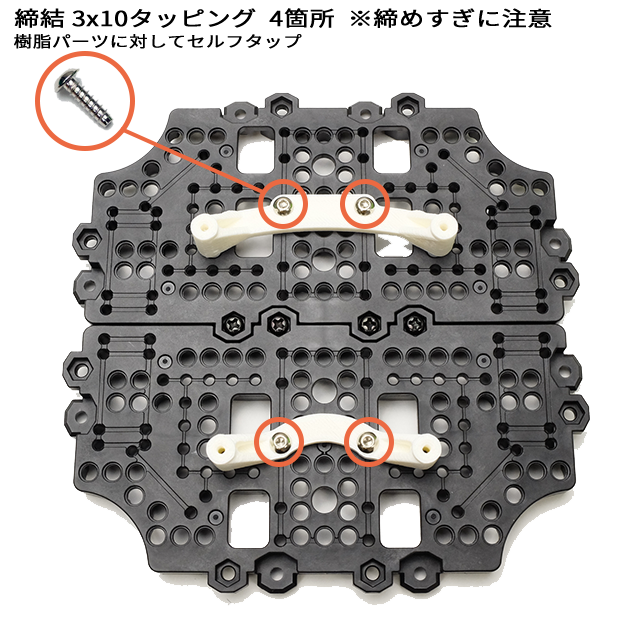
工程1:OpenCRマウントを下図のように組立済みのWaffle Plateに取り付けます。
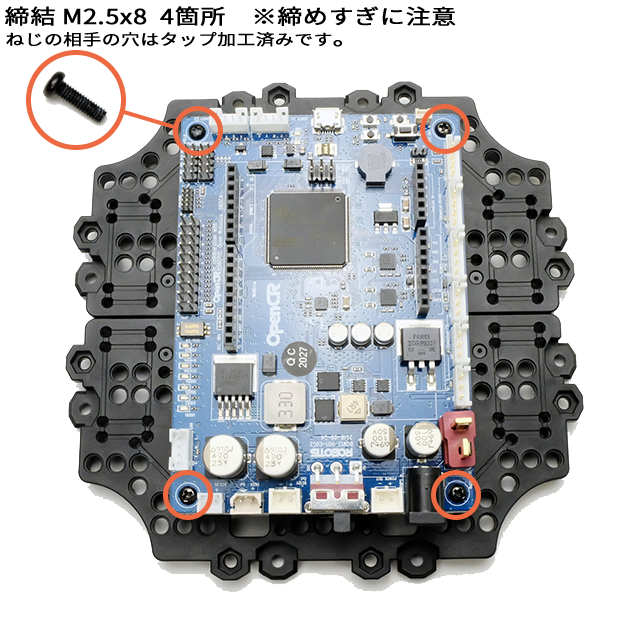
 工程2:OpenCRマウントにOpenCR1.0を固定します。前後シンメトリーです。
工程2:OpenCRマウントにOpenCR1.0を固定します。前後シンメトリーです。
【LDS-01の取り付け】
TURTLEBOT3 Burger Assembly ManualのP24 ~ P26を次のように読み替えてください。
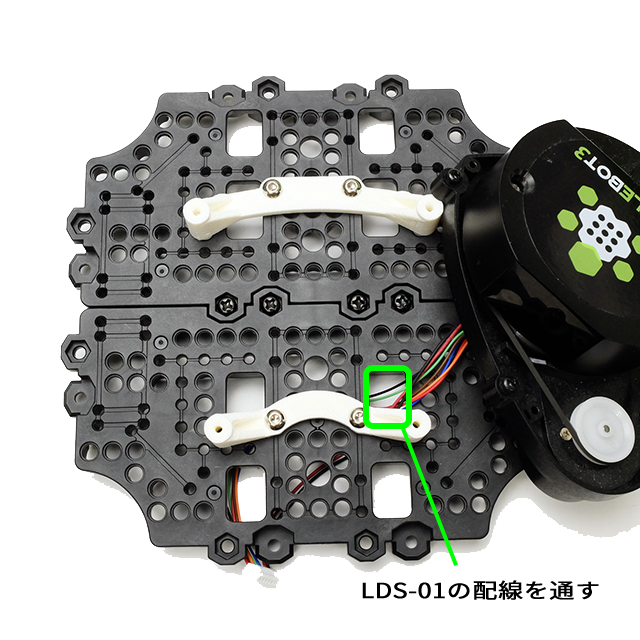
工程1:LDS-01マウントを下図のように組立済みのWaffle Plateに取り付けます。
 工程2:LDS-01の配線をWaffle Plateの角穴に上から下に通します。
工程2:LDS-01の配線をWaffle Plateの角穴に上から下に通します。
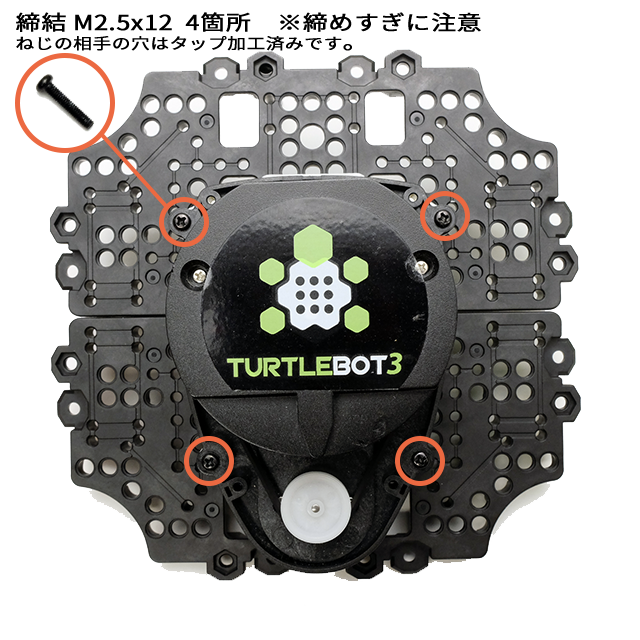
 工程3:LDS-01マウントにLDS-01を固定します。
工程3:LDS-01マウントにLDS-01を固定します。
【追加テーブルの取り付け】
TURTLEBOT3 Burger Assembly ManualのP27まで終えたら、追加で次の作業を行います。
工程1:オプションパーツ袋に入っているWaffle Plateを組み立てます。
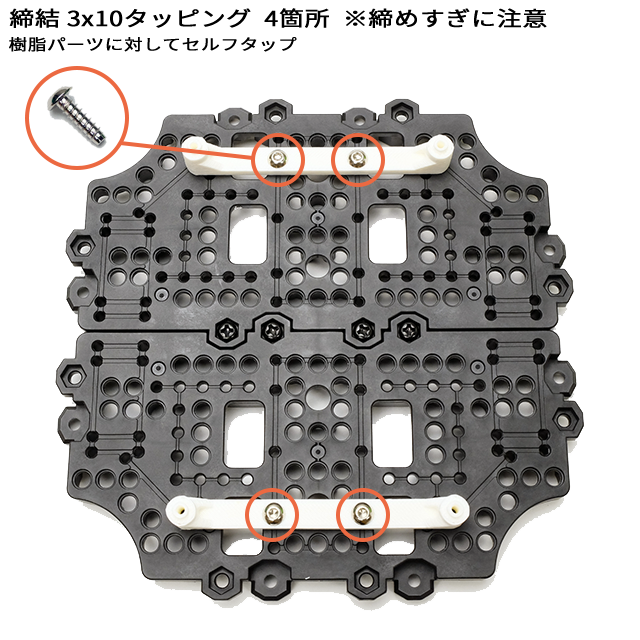
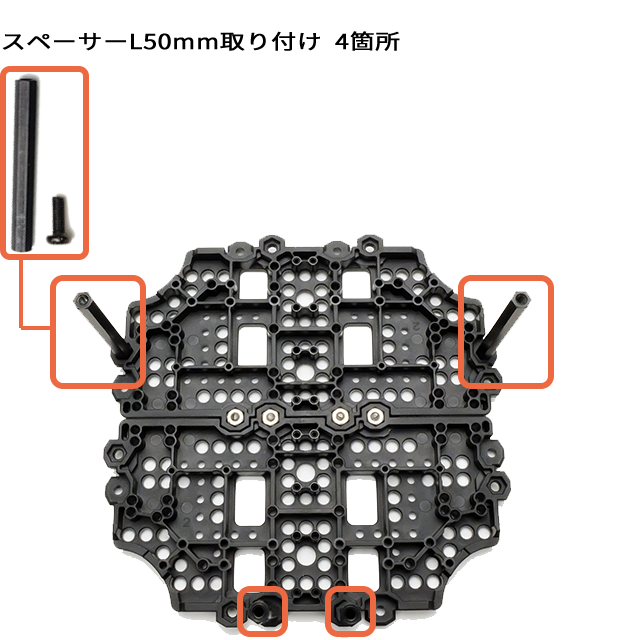
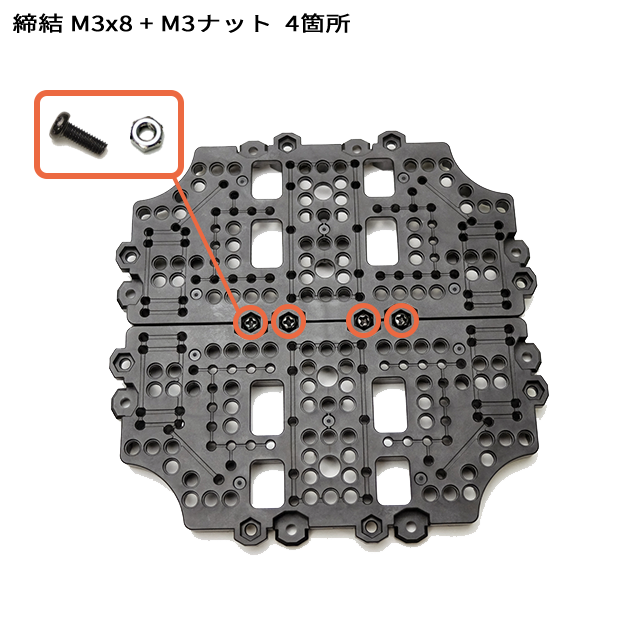 工程2:下図ようにWaffle Plateスペーサー長さ50mmを組立済みのWaffle Plateに取り付けます。
工程2:下図ようにWaffle Plateスペーサー長さ50mmを組立済みのWaffle Plateに取り付けます。
 工程3:組立済みのTURTLEBOT3 Burgerに追加テーブルを取り付けます。
工程3:組立済みのTURTLEBOT3 Burgerに追加テーブルを取り付けます。
【Pi-Camera Frame Set(ラズパイカメラ用マウント)について】
RSJロボット工学セミナーではこのパーツは使用しません。
対応カメラ Raspberry Pi Camera Module V2.1
※ ラズパイカメラは別売です。
※カメラ接続用ケーブルは、カメラモジュールに付属のものを使用します。別途購入する必要はありません。
 ※ ROS MelodicではRaspberry Pi Camera ModuleのROS Package対応が済んでいないため、使用するためには自身で必要な設定やライブラリをインストールする必要があります。
※ ROS MelodicではRaspberry Pi Camera ModuleのROS Package対応が済んでいないため、使用するためには自身で必要な設定やライブラリをインストールする必要があります。
ソフトウェアセットアップ
【ROS Packageインストール差分】
リモートPCをセットアップする際に手順を変更します。
手順: ROBOTIS e-manualの3. Quick Start Guide - 3.1. PC Setup - 3.1.4. Install TurtleBot3 Packagesの手順を変更します。
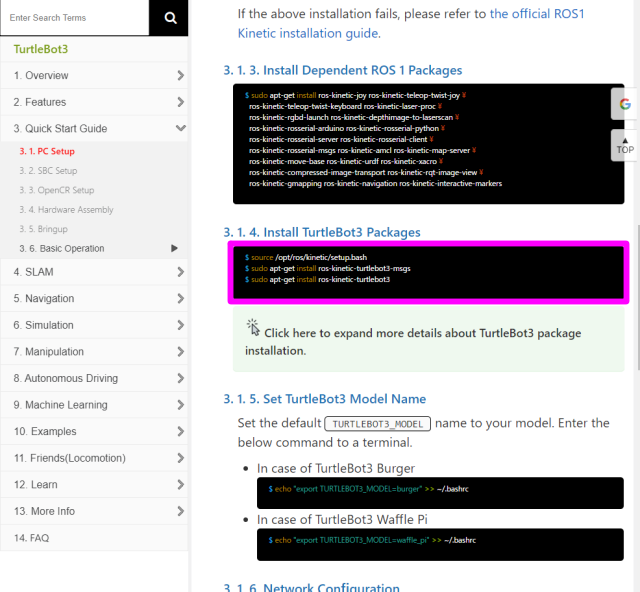
変更内容:
◯Kineticの場合
$ sudo apt-get remove ros-kinetic-turtlebot3-msgs
$ sudo apt-get remove ros-kinetic-turtlebot3
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src/
$ git clone -b kinetic-devel https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
$ git clone -b add-table-and-camera https://github.com/ROBOTIS-JAPAN-GIT/turtlebot3.git
$ cd ~/catkin_ws && catkin_make
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
◯Melodicの場合 ※セミナーではKineticを使用します。
$ sudo apt-get remove ros-melodic-turtlebot3-msgs
$ sudo apt-get remove ros-melodic-turtlebot3
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src/
$ git clone -b melodic-devel https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
$ git clone -b add-table-and-camera https://github.com/ROBOTIS-JAPAN-GIT/turtlebot3.git
$ cd ~/catkin_ws && catkin_make
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
セミナー仕様TURTLEBOT3 BurgerのURDFへのリンク
https://github.com/ROBOTIS-JAPAN-GIT/turtlebot3/tree/add-table-and-camera/turtlebot3_description/urdf
Copyright© 2021 ROBOTIS CO., LTD. Japan branch
RSJロボット工学セミナーではこのパーツは使用しません。
対応カメラ Raspberry Pi Camera Module V2.1
※ ラズパイカメラは別売です。
※カメラ接続用ケーブルは、カメラモジュールに付属のものを使用します。別途購入する必要はありません。
※ ROS MelodicではRaspberry Pi Camera ModuleのROS Package対応が済んでいないため、使用するためには自身で必要な設定やライブラリをインストールする必要があります。 ソフトウェアセットアップ
【ROS Packageインストール差分】
リモートPCをセットアップする際に手順を変更します。
手順: ROBOTIS e-manualの3. Quick Start Guide - 3.1. PC Setup - 3.1.4. Install TurtleBot3 Packagesの手順を変更します。
変更内容:
◯Kineticの場合
$ sudo apt-get remove ros-kinetic-turtlebot3-msgs
$ sudo apt-get remove ros-kinetic-turtlebot3
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src/
$ git clone -b kinetic-devel https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
$ git clone -b add-table-and-camera https://github.com/ROBOTIS-JAPAN-GIT/turtlebot3.git
$ cd ~/catkin_ws && catkin_make
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
◯Melodicの場合 ※セミナーではKineticを使用します。
$ sudo apt-get remove ros-melodic-turtlebot3-msgs
$ sudo apt-get remove ros-melodic-turtlebot3
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src/
$ git clone -b melodic-devel https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
$ git clone -b add-table-and-camera https://github.com/ROBOTIS-JAPAN-GIT/turtlebot3.git
$ cd ~/catkin_ws && catkin_make
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
セミナー仕様TURTLEBOT3 BurgerのURDFへのリンク
https://github.com/ROBOTIS-JAPAN-GIT/turtlebot3/tree/add-table-and-camera/turtlebot3_description/urdf
$ sudo apt-get remove ros-kinetic-turtlebot3-msgs
$ sudo apt-get remove ros-kinetic-turtlebot3
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src/
$ git clone -b kinetic-devel https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
$ git clone -b add-table-and-camera https://github.com/ROBOTIS-JAPAN-GIT/turtlebot3.git
$ cd ~/catkin_ws && catkin_make
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
$ sudo apt-get remove ros-melodic-turtlebot3-msgs
$ sudo apt-get remove ros-melodic-turtlebot3
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src/
$ git clone -b melodic-devel https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
$ git clone -b add-table-and-camera https://github.com/ROBOTIS-JAPAN-GIT/turtlebot3.git
$ cd ~/catkin_ws && catkin_make
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
Copyright© 2021 ROBOTIS CO., LTD. Japan branch