
- 24V
PH54-100-S500-R
| 注意事項 | 【モデル名変更のお知らせ】 「DYNAMIXEL PRO Plus」は、2020年1月よりモデル名が「DYNAMIXEL P series」に変更となりました。 商品番号(SKU)及び製品の仕様・機能に変更はありません。 |
|---|---|
| 発売時期 | 2018年10月10日発売 |

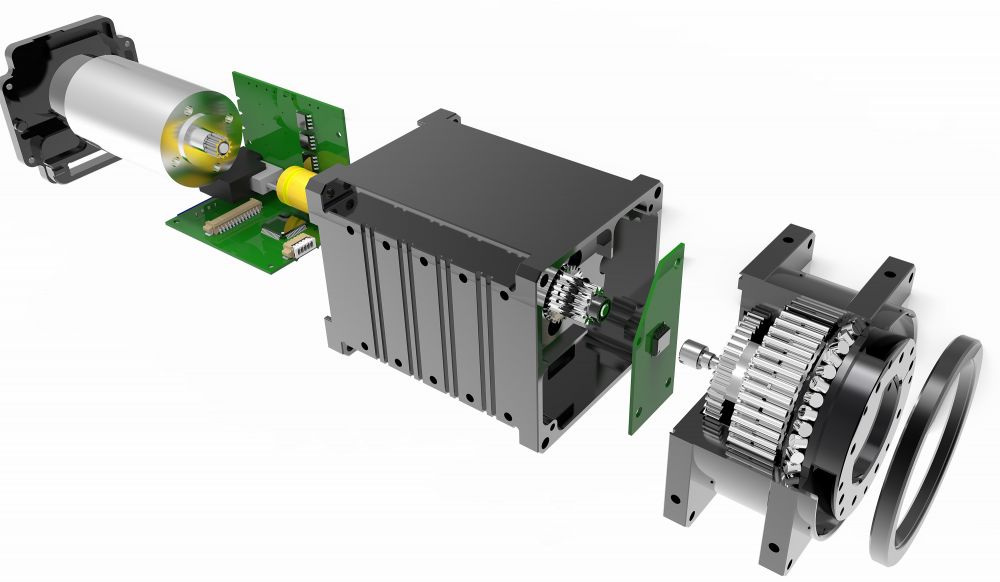
DYNAMIXEL is a robot exclusive smart actuator with fully integrated DC Motor + Controller + Driver + Sensor + Reduction Gear + Network in one DC servo module.
DYNAMIXEL-P Series implements removable reduction cycloid gears, resulting in high precision and impact resistance.
- Torque control based on current sensing
- Position, Torque and Speed-based command
- High resolution with combination of Incremental Encoder and Contactless Absolute Encoder
- Full metal housing for high durability
- Can be used to make a full-size manipulator, pan tilt, humanoid, etc.
[DYNAMIXEL PRO -> P] Upgrade Details
- Improved design and JST connectors applied
- Improved dirt inflow and leakage
- Improved control table (Supports X Series functions)
- Enhanced control performance such as responsiveness and resolution
- Enhanced communication responsiveness
- Improved heat, noise, and durability
| PH54-100-S500-R | 1 |
|---|---|
| Robot Cable-X4P 300mm(Convertible) | 1 |
| Robot Cable-X4P 300mm | 1 |
| Power Cable-2P 600mm | 1 |
| Wrench Bolt WB M3x8 | 20 |
Controller : OpenCM 485 Expansion Board, OpenCR1.0
Interface : USB2Dynamixel, U2D2
ID : 1
Baud Rate : 57600bps
(User can change various settings including ID and baud rate according to environment)
The operational voltage is different from other DYNAMIXEL series (Operational voltage: 24V).
Depending on the number of units used, it is recommended to use a separate power supply.
JST 4Pin connector is applied for communication.
The 54-series can NOT use the old hinge frames.
NOT COMPATIBLE with FRP54-H110/120/210/220)
| Model Name | PH54-100-S500-R | |
|---|---|---|
| MCU | Cortex-M4 (168 [Mhz], 32 [bit]) | |
| Input Voltage | Min. [V] | - | Recommended [V] | 24.0 | Max. [V] | - |
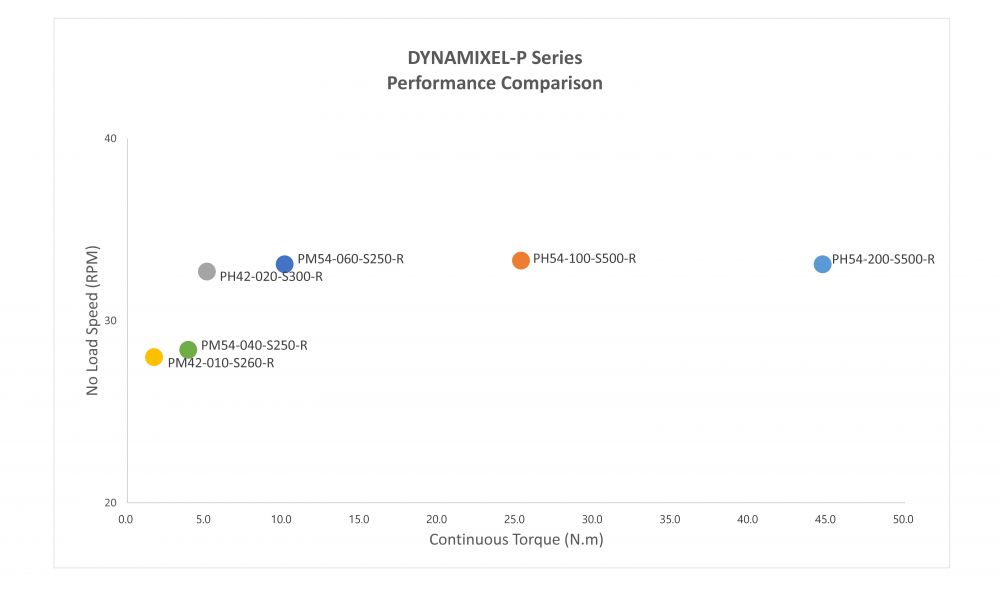
| Performance Characteristics | Voltage [V] | 24.0 | Stall Torque [N·m] | - | Stall Current [A] | - | No Load Speed [rpm] | 33.3 | No Load Current [A] | 1.13 |
| Continuous Operation | Voltage [V] | 24.0 | Torque [N·m] | 25.3 | Speed [rpm] | 29.2 | Current [A] | 5.5 |
| Resolution | Resolution [deg/pulse] | 0.0004 | Step [pulse] | 1 | Angle [degree] | 360 |
| Position Sensor | Contactless absolute encoder Incremental encoder | |
| Operating Temperature | Min. [°C] | -5 | Max. [°C] | 55 |
| Motor | BLDC (Maxon) | |
| Baud Rate | Min. [bps] | 9,600 | Max. [bps] | 10,500,000 |
| Control Algorithm | PID | |
| Gear Type | Cycloid | |
| Gear Material | Metal | |
| Case Material | Metal | |
| Dimensions (WⅹHⅹD) [mm] | 54.0 X 108.0 X 54.0 | |
| Dimensions (WⅹHⅹD) [inch] | 2.13 x 4.25 x 2.13 | |
| Weight [g] | 0.00 | |
| Weight [oz] | 26.10 | |
| Gear Ratio | 501.9 : 1 | |
| Command Signal | Digital Packet | |
| Protocol Type | Half duplex Asynchronous Serial Communication (8bit, 1stop, No Parity) | |
| Link (Physical) | RS485 Multi Drop Bus | |
| ID | 0 ~ 252 | |
| Feedback | Position, Velocity, Current, Temperature, Voltage, External Port, etc | |
| Protocol version | Protocol 2.0 Modbus | |
| Operating Mode / Angle | Current Control mode:Endless turn Velocity Control mode:Endless turn Position Control Mode:360 [deg] Extended Position Control Mode: PWM Control Mode:Endless turn | |
| Output [W] | 100 | |
| Standby Current [mA] | 40 | |


