



特徴
DYNAMIXEL XW540-T140は、重量185gのスマートアクチュエータです。Maxon製コアレスモーターとフルメタルケース・フルメタルギアを採用し、IP68(水深1m・24時間)の高い防水防塵性能を備えています。産業用ロボットや過酷な環境での使用を想定した高性能DYNAMIXELシリーズです。
- 高い防水防塵性能(IP68)
IP68規格(水深1m・24時間)に対応し、水中や粉塵の多い環境でも安定した動作が可能です。
- Maxon製コアレスモーター搭載
高品質なMaxon製コアレスモーターを採用することで、滑らかで高効率な駆動を実現しています。
- フルメタルケース&フルメタルギア
ケースおよびギアにはすべて金属素材を使用しており、高い耐久性と剛性を発揮します。
- 多彩な制御モード
電流制御・速度制御・位置制御・拡張位置制御(マルチターン)・電流ベース位置制御・PWM制御の6種類のモードに対応し、幅広いアプリケーションに活用できます。
- 非接触式アブソリュートエンコーダ採用
ams社製AS5045(12bit、360°)の非接触式アブソリュートエンコーダにより、4096パルス/回転の高分解能な位置検出を実現しています。
内容物一覧
| お届け内容 | 数量 |
|---|---|
| XW540-T140-R 本体 | 1個 |
| ホーン HN13-N105 | 1個 |
| ロボットケーブル-WP 1000mm | 1本 |
| ロボットケーブル-WP 1000mm(延長用) | 1本 |
| 六角穴付きボルト WB M2.5×5 | 16本 |
| 六角穴付きボルト WB M2.5×4 | 10本 |
| 六角穴付きボルト WB M3×10 | 1本 |
※各種フレームやオプションアクセサリは必要に応じて別途お買い求めください。
詳細ハードウェア仕様(Specifications)
※ROBOTIS公式ドキュメント(docs.robotis.com)の仕様情報に基づいています。
| 制御コア (MCU) | ARM Cortex-M3 (72 MHz, 32bit) |
| 位置センサ (Position Sensor) | 非接触式アブソリュートエンコーダ (12bit, 360°) メーカー:ams (www.ams.com)、型番:AS5045 |
| モーター種類 (Motor) | コアレスモーター(Maxon製) |
| 通信速度 (Baud Rate) | 9,600 [bps] ~ 4.5 [Mbps] |
| 制御アルゴリズム (Control Algorithm) | PID制御 |
| 分解能 (Resolution) | 4,096 [pulse/rev]、バックラッシュ:15 [arcmin](0.25°) |
| 動作モード (Operating Modes) | 電流制御モード、速度制御モード、位置制御モード(0~360°)、拡張位置制御モード(マルチターン)、電流ベース位置制御モード、PWM制御モード(電圧制御モード) |
| 重量 (Weight) | 185 [g] |
| 外形寸法 (Dimensions) | 33.5 x 58.5 x 45.9 [mm] |
| 減速比 (Gear Ratio) | 145.6 : 1 |
| ストールトルク (Stall Torque) | 6.4 [N.m] (at 11.1 [V], 4.5 [A], 1.422 [Nm/A]) 6.9 [N.m] (at 12.0 [V], 4.9 [A], 1.408 [Nm/A]) 8.3 [N.m] (at 14.8 [V], 5.9 [A], 1.407 [Nm/A]) |
| 無負荷回転数 (No Load Speed) | 67 [rev/min] (at 11.1 [V]) 72 [rev/min] (at 12.0 [V]) 88 [rev/min] (at 14.8 [V]) |
| 動作環境温度 (Operating Temperature) | -5 ~ +80 [°C] |
| 入力電圧 (Input Voltage) | 10.0 ~ 14.8 [V](推奨:12.0 [V]) |
| コマンド信号 (Command Signal) | デジタルパケット |
| 物理接続 (Physical Connection) | RS-485 マルチドロップバス/RS-485 非同期シリアル通信(8bit、1stop、パリティなし) |
| ID設定範囲 (ID) | 253 ID(0 ~ 252) |
| フィードバック情報 (Feedback) | 位置、速度、電流、リアルタイムティック、トラジェクトリ、温度、入力電圧 など |
| ケース材質 (Case Material) | フルメタルケース |
| ギヤ材質 (Gear Material) | フルメタルギア |
| 待機電流 (Standby Current) | 40 [mA] |
| ラジアル荷重 (Radial Load) | 40 [N] (10 [mm] away from the horn) |
| アキシャル荷重 (Axial Load) | 20 [N] |
| 防水・防塵等級 (Ingress Protection Rating) | IP 68 (1 m, 24 hr) |
主要な動作モード(Operating Mode)
XW540-T140は、用途に合わせてコントロールテーブル内の「Operating Mode(11)」を切り替えることで、以下の多彩な制御に対応します。
| 動作モード | 概要 |
|---|---|
| 位置制御モード Position Control Mode |
通常の関節動作に適した、0〜360°の単回転範囲内での高精度位置決め制御(デフォルト)。 |
| 拡張位置制御モード Extended Position Control Mode |
±256回転(512ターン)までのマルチターン位置制御。減速ギヤ付き外部機構や巻取り機構に最適。 |
| 電流ベース位置制御モード Current-based Position Control Mode |
位置を正確に制御しつつ、同時に加えられる最大トルク(電流制限)も制御する高度なモード。ロボットハンド等の把持部に。 |
| 速度制御モード / PWM制御モード Velocity / PWM Control Mode |
ホイール駆動に適したエンドレスの速度指定回転、または印加電圧(PWMデューティ)の直接操作。 |
| 電流制御モード Current Control Mode |
速度・位置フィードバックなしで電流(トルク)のみを直接指定。グリッパー等の力制御に。 |
※ プロファイルの生成と制御について
位置制御および拡張位置制御モードでは、目標値までの急激な加減速による衝撃を緩和するため、内部で台形・三角形等の独自の「移動プロファイル」を自動生成させることが可能です。これによりロボットへの物理的負荷と振動を大幅に低減できます。
ご使用上の注意
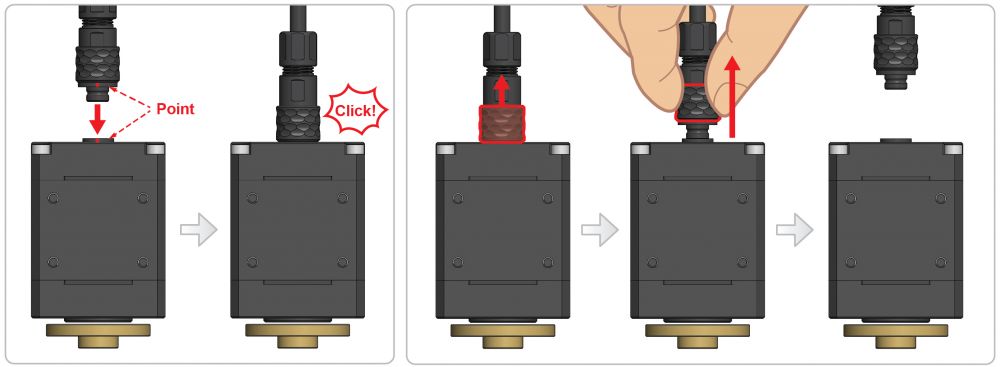
- 電源投入時のケーブル接続・取り外し禁止
電源供給中にDYNAMIXELのケーブルを接続・取り外しすることは禁止されています。必ず電源をオフにしてから作業を行ってください。
- 指定電圧範囲の厳守
入力電圧は10.0〜14.8V(推奨12.0V)の範囲内でご使用ください。範囲外の電圧を印加すると製品の損傷や故障の原因となります。
- 動作中の身体接触禁止
動作中は指・腕・足など身体の一部をサーボ可動部に近づけないでください。けがをする危険があります。
- 異常発生時の即時停止
異臭・異音・煙が発生した場合は直ちに使用を中止し、電源を遮断してください。そのまま使用し続けると重大な事故につながる恐れがあります。
- 分解・改造の禁止
製品の分解や改造は行わないでください。また、強い衝撃を与えたり落下させたりすることも破損の原因となります。
- コネクタのゴムキャップおよび防水に関するご注意
ゴムキャップはゴムパッキンと連結されているため、引っ張ると変形し浸水の原因となる場合があります。また、ゴムキャップは防塵用であり防水機能はありません。水中で使用する際は必ず防水ケーブルをご使用ください。なお、XWシリーズ用防水ケーブルはコネクタ側が防水コネクタ・反対側がJSTコネクタとなっており、OpenCRには直接接続可能です。OpenCM9.04 + OpenCM 485拡張ボードはMolexコネクタのみのため、U2D2 PHBを利用した変換ケーブルが別途必要です。

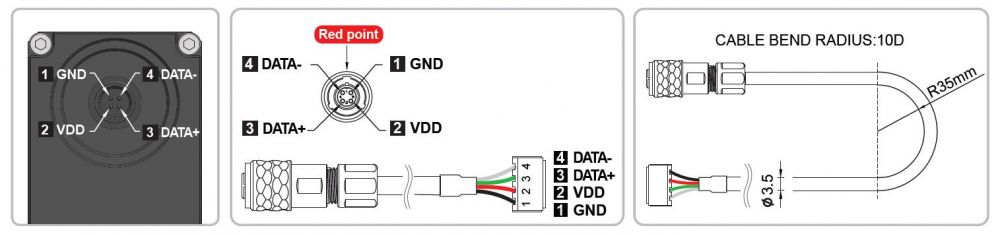
防水配線
適合コントローラ・インターフェース
コントローラ:OpenRB-150, OpenCR など(※RS485通信回路を備えたもの)
インターフェース:U2D2(PC直接制御用シリアルコンバータ)
工場出荷時設定(初期設定)
ID:1
通信速度(Baud Rate):57,600 bps
プロトコル:Protocol 2.0
※ ID・通信速度および動作パラメーターなどの各種設定は、専用の管理ソフト「DYNAMIXEL Wizard 2.0」等で自由に変更・保存可能です。






