



特長
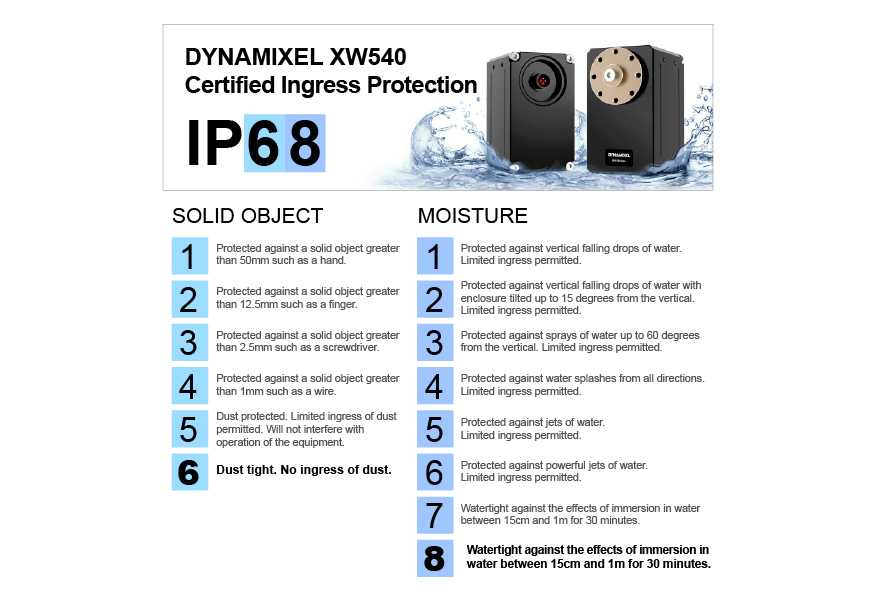
DYNAMIXEL XWシリーズは、ROBOTIS初のIP等級対応モデルであり、IP68(1m、24時間)の認証を取得しています。湿潤環境、水中、および密閉型サーボが必要なあらゆる屋外用途で使用できるよう設計されています。
XWシリーズは、防水ケーブルと延長ケーブルが別途付属しています。
- 6つの動作モード
(トルク制御、速度制御、位置制御、拡張位置制御、電流ベース位置制御、PWM制御) - スムーズな動作計画のためのプロファイル制御
- アルミニウムケースによる放熱性能の向上
- 簡単でシンプルな組立構造
- 省エネルギー(待機電流を100mAから40mAへ削減)
- MX-28と比較して体積が31%削減されました。
Certified Ingress Protection
Package Components
| Item | Quantity | Description |
|---|---|---|
| XW430-T333-R | 1 | DYNAMIXEL |
| HN12-N105 | 1 | Standard horn for XW430 models |
| Robot Cable-WP 1000mm | 1 | Waterproof cable |
| Robot Cable-WP 1000mm(Extension) | 1 | Waterproof cable(extension) |
| Wrench Bolt WB M2.5x4 | 16 | For frame assembly(Side hole) |
| Wrench Bolt WB M2x4 | 10 | For frame assembly |
| Wrench Bolt WB M2.5x8 | 1 | For horn assembly |
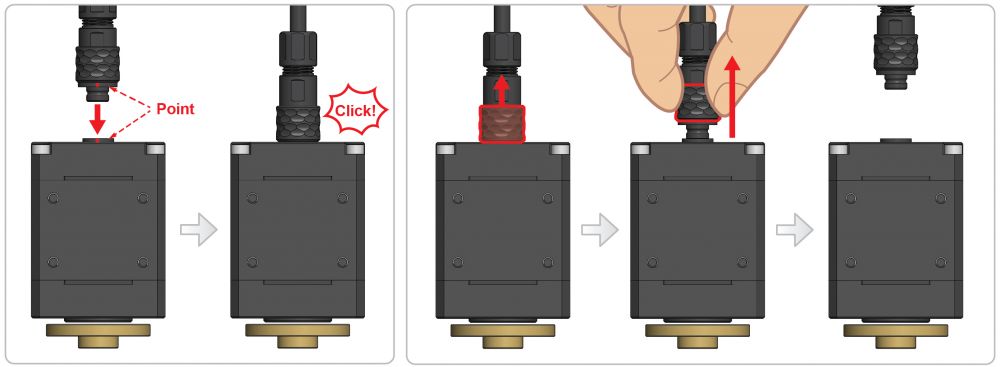
Waterproof Cabling
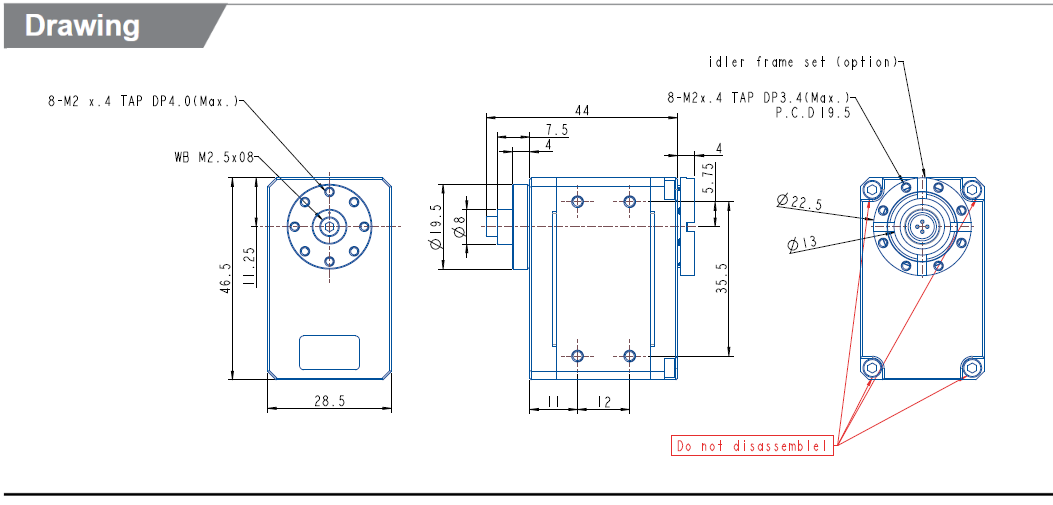
Drawing
注意事項
コネクタのゴムキャップを引っ張らないでください。
ゴムキャップはゴムパッキンと連結されており、変形すると浸水の原因となる場合があります。また、ゴムキャップは防塵用であり、防水機能はありません。水中で使用する際は、必ず防水ケーブルをご使用ください。
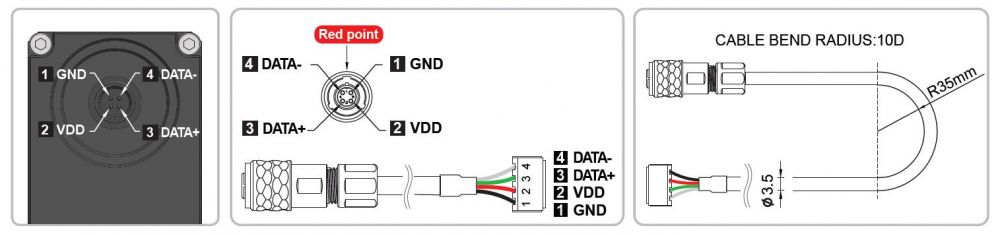
DYNAMIXEL XWシリーズでは、防水ケーブルを使用します。
ケーブルの片側は防水コネクタ、もう片側はJSTコネクタです。延長ケーブルは両側とも防水コネクタです。
OpenCRコントローラはJSTコネクタを備えており、直接接続が可能です。OpenCM9.04 + OpenCM 485拡張ボードはMolexコネクタのみのため、U2D2 PHBを利用した変換ケーブルが必要です。

Specification
| Model Name | XW430-T333-R | |
|---|---|---|
| MCU | Cortex-M3 (72 [Mhz], 32 [bit]) | |
| Input Voltage | Min. [V] | 10.0 |
| Recommended [V] | 12.0 | |
| Max. [V] | 14.8 | |
| Performance Characteristics | Voltage [V] | 12.0 |
| Stall Torque [N·m] | 3.10 | |
| Stall Current [A] | 1.3 | |
| No Load Speed [rpm] | 31.0 | |
| No Load Current [A] | 0.07 | |
| Continuous Operation | Voltage [V] | - |
| Torque [N·m] | - | |
| Speed [rpm] | - | |
| Current [A] | - | |
| Resolution | Resolution [deg/pulse] | 0.0879 |
| Step [pulse] | 4,096 | |
| Angle [degree] | 360 | |
| Position Sensor | Contactless absolute encoder (12 [bit], 360 [deg]) Maker : ams(www.ams.com), Part No : AS5045 |
|
| Operating Temperature | Min. [°C] | -5 |
| Max. [°C] | 80 | |
| Motor | Coreless (Maxon) | |
| Baud Rate | Min. [bps] | 9,600 |
| Max. [bps] | 4,500,000 | |
| Control Algorithm | PID | |
| Gear Type | Spur | |
| Gear Material | Metal | |
| Case Material | Metal(Front, Middle, Back) | |
| Dimensions (WⅹHⅹD) [mm] | 28.5 x 46.5 x 34.0 | |
| Dimensions (WⅹHⅹD) [inch] | 1.12 x 1.83 x 1.34 | |
| Weight [g] | 96.00 | |
| Weight [oz] | 3.39 | |
| Gear Ratio | 332.8:1 | |
| Command Signal | Digital Packet | |
| Protocol Type | Half duplex Asynchronous Serial Communication (8bit, 1stop, No Parity) |
|
| Link (Physical) | RS485 Multi Drop Bus | |
| ID | 0 ~ 252 | |
| Feedback | Position, Velocity, Current, Realtime tick, Trajectory, Temperature, Voltage, External Port, etc. | |
| Protocol version | 1.0 2.0(Default) |
|
| Operating Mode / Angle |
Current Control mode:Endless turn Velocity Control mode:Endless turn Position Control Mode:360 [deg] Extended Position Control Mode:±256 [rev] Current-based Position Control Mode:±256 [rev] PWM Control Mode:Endless turn |
|
| Output [W] | - | |
| Standby Current [mA] | 40 | |





