
OMX-AI
The Most Optimized Robotics Platform to Start AI and Robotics Research
| 注意事項 | ※本商品は組み立てキットです。 ※カメラは付属しておりません。お客様にてご用意ください(Customer-provided)。 ※電源用SMPS(電源アダプター)は付属しておりませんので、別途ご用意ください。 |
|---|---|
| 納期 | 1〜2ヶ月程度(発売直後のため、ご注文状況により前後する場合がございます) |
| 購入方法 | ※本製品は他商品と異なり、カートからご注文いただけますが在庫を保証するものではありません。発売直後のため生産および供給が安定しておらず、納期は約1~2ヶ月程度となる場合がございます。 |
特徴
ROBOTIS OpenMANIPULATOR-X (RM-X52-TNM) は、手軽にデータセットの収集やロボット制御、アルゴリズムの比較ができるエントリー向けのオープンソース・Physical AIマニピュレータです。5-DOFのコンパクトなプラットフォームで、Physical AIへのスムーズな参入をサポートします。
-
モーターの初期設定が不要
すべてのDYNAMIXELアクチュエータパラメータは工場出荷時に設定済みです。追加の複雑なハードウェア・ソフトウェアセットアップなしで、接続後すぐに使用できます。
-
キャリブレーションが不要
すべてのアクチュエータは工場でキャリブレーションされているため、ユーザーによる面倒な調整は一切不要。プラグアンドプレイに対応しています。
-
安全なホームポジション復帰
起動時にどの位置からでも安全に初期ポーズへ戻ることができます。安定した予測可能な動作により、初めての方でも安心して扱えます。
-
360°回転可能なベース(高拡張性)
ベースモーターには拡張位置デザインを採用。専用ケーブル配線方法により、作業スペースを大幅に広げられる構造になっています。
-
優れた軽量設計
総重量は約700gと非常に軽量に設計されており、どこへでも簡単に持ち運んで展開できます。長時間の使用でも堅牢なパフォーマンスを維持します。
-
低摩擦なリーダーユニット対応
特別な低摩擦・軽量設計により、操作側のデバイス(リーダー)の操作は非常にスムーズです。最小限の力で直感的に遠隔操作でき、スムーズなデータ収集を可能にします。
-
リーダーは外部電源不要
OMX-LリーダーデバイスはUSB-C(U2D2等経由)接続による給電・通信に対応しているため、ノートPCに繋ぐだけでシミュレーションやクイックトライアルが可能です。
-
スプリング効果トリガー
バネを内蔵した制御メカニズムにより、快適で再現性の高いグリップフィードバックを提供し、長時間のデータ収集におけるオペレーターの疲労を軽減します。
-
ユーザー中心のデザイン
視界を遮りにくいオープンタイプのグリッパーデザインや、再現性の高いデータ取得のための明確なベース初期位置など、細部にこだわっています。
OMX ラインアップ一覧
- リーダーユニット(Leader)とフォロワーユニット(Follower)はセット販売のみとなります。
- 電源用SMPS(電源アダプター)は付属しておりませんので、別途ご用意ください。
- カメラは付属しておりません。お客様にてご用意ください(Customer-provided)。
- 通電中の配線禁止: 故障やショートを防ぐため、電源が供給されている状態(通電中)でのDYNAMIXELケーブルの抜き差しや配線の変更は絶対に行わないでください。
- 稼働時の安全確保: ロボットアーム動作中は関節部に手や顔を近づけないでください。また、ベースはベースプレート等へ確実にネジ固定してご使用ください。
ハードウェア仕様
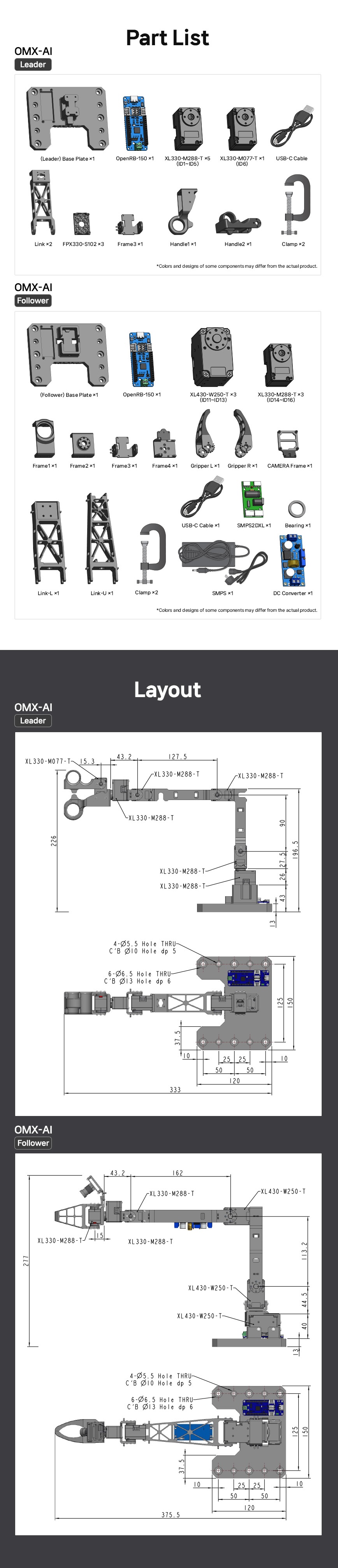
| 項目 (Items) | OMX-AI (Leader) | OMX-AI (Follower) |
|---|---|---|
| 自由度 (DOF) |
5自由度 + 1グリッパー | 5自由度 + 1グリッパー |
| 最大リーチ (Reach) |
335 mm | 400 mm |
| 総重量 (Weight) |
360 g | 560 g |
| 定格電圧 (Operating Voltage) |
5 VDC | 12 VDC |
| 関節分解能 (Joint Resolution) |
-π(rad) ~ π(rad), -2,048 ~ 2,048 [pulse/rev] | -π(rad) ~ π(rad), -2,048 ~ 2,048 [pulse/rev] |
| 関節可動範囲 (Joint Range) |
Joint 1 : -270° ~ +360° Joint 2, 3 : -120° ~ +90° Joint 4 : -100° ~ +100° Joint 5 : ±270° Joint 6 : 0° ~ +100° |
Joint 1 : -270° ~ +360° Joint 2, 3 : -120° ~ +90° Joint 4 : -100° ~ +100° Joint 5 : ±270° Joint 6 : 0° ~ +100° |
| 搭載アクチュエータ (DYNAMIXEL-Y Specification) |
ID 1~5 : XL330-M288-T ID 6 : XL330-M077-T |
ID 11~13 : XL430-W250-T ID 14~16 : XL330-M288-T |
| ホストインターフェース (Host Interface) |
USB C-Type | USB C-Type |
| 内部通信方式 (Internal Communications) |
TTL | TTL |
| 通信ボーレート (Communication Baudrate) |
1 Mbps | 1 Mbps |
| 対応ソフトウェア (SW) |
ROS 2 | ROS 2 |
統合システムとAIワークフローについて
ROBOTIS OpenMANIPULATOR-Xは、最新のロボット工学ソフトウェアスタックおよび先進的なAI開発パイプラインとネイティブに統合できるよう設計されています。
※ 主要なサポート機能
- ① ROS & ROS 2 ネイティブ対応:ROS / ROS 2(Robot Operating System)に公式対応しており、MoveIt!などの標準的なロボティクスソフトウェアスタック、DYNAMIXEL SDK、Arduino IDEとシームレスに連携。高度なシミュレーションや軌道計画の拡張機能を利用可能。
- ② エンドツーエンドのAIパイプライン:オープンソースコミュニティで支持されるHugging Faceの「LeRobot」ワークフローや、直感的なGUI環境を提供する「ROBOTIS Physical AI Tools」とそのまま互換。パッケージを開けてすぐにAI駆動のアプリケーション構築や、模倣学習(Imitation Learning)・強化学習(Reinforcement Learning)の検証が行えます。
