


HX5-D20-MRT
20DoF Hand (Right)
| 注意事項 | 本製品は右手仕様です。左手仕様をご希望の場合は「HX5-D20-MLT 905-0059-000」をご選択ください。 |
|---|---|
| 発売時期 | 約2か月 |
| 購入方法 | 本製品のご購入をご希望の方は、 お問い合わせフォームよりご連絡ください。 |
特徴
ROBOTIS HX Handシリーズは、機械的な精密さと高度な知能を融合させた、ロボットマニピュレーションの未来を担うロボットハンドです。信頼性の高いDynamixelスマートアクチュエータをベースに、人間の手を模した構造と最先端のPhysical AI(物理AI)を統合しています。
-
高器用な20自由度(20-DOF)設計
HX5-D20は20の自由度(Degree of Freedom)を持つアーキテクチャを採用しており、各指に4自由度を備えています。これにより、人間の手のような極めて器用な動きが可能になり、正確な操作や複雑な把持タスクを実行できます。
-
ダイレクトドライブによる指の駆動
各指の関節は、ダイレクトドライブ構成の「XM335-T323-T DYNAMIXEL」アクチュエータによって駆動します。この構造により、機械的な堅牢性が向上し、バックラッシ(ガタつき)が低減され、制御が簡素化されると同時に、繰り返しの使用に対しても信頼性の高いパフォーマンスを保証します。
-
指先に統合された触覚センサ
各指先には、接触時にかかる圧力を測定する触覚センサが装備されています。これにより、手全体で接触や把持力を検知することができ、安定した把持や、壊れやすいデリケートな物体との相互作用をサポートします。
デモンストレーション動画一覧
| 動画タイトル / 概要 | デモンストレーション動画(再生) |
|---|---|
|
ROBOTIS HAND #1: HX5-D20 Introduction – More Than Dexterous
HX5-D20の基本的なスペックと、ただ器用なだけではない進化したロボットハンドの全体概要を紹介する製品紹介動画です。 |
|
|
ROBOTIS HAND #2: HX5-D20 Grasping with Tactile Sensor Feedback
高感度な触覚センサーのフィードバックを利用し、対象物の硬さに合わせた「よりスマートなタッチと安全な把持(グリッピング)」を解説するチュートリアル動画です。 |
|
|
AI WORKER #9: Five-Finger Hand in Action – Dexterous Manipulation Showcase
5本指の特性をフルに活かし、人間のような複雑で緻密な物体操作(マニピュレーション)を行う様子を収録したデモンストレーション動画です。 |
|
ハードウェア仕様
| 指の数 (Number of Fingers) |
5 |
| 自由度 (Degrees of Freedom) |
20 (4 DoF / 1 Finger) |
| 通信速度 (Baud Rate) |
9,600 bps ~ 6 Mbps (初期値: 4 Mbps) |
| 制御周波数 (Control Frequency) |
1 kHz |
| 重量 (Weight) |
1,000 g ± 2% |
| 動作電圧 (Operating Voltage) |
24 V |
| 指先センサ (TIP Sensor) |
9アレイセンサ (出力値: 0 ~ 255) |
| 動作モード (Operating Mode) |
ダイレクトコントロールモード / プリセットモーションモード |
| 最大把持荷重 (Max Load for Envelop) |
15 kg |
| 指先最大力 (Max Finger Tip Force) |
14 N |
| ピーク電流 (Peak Current) |
2.6 A |
| 指アクチュエータ (Finger Actuator) |
XM335-T323-T |
| 動作環境温度 (Operating Temperature) |
-5 ~ 55 ℃ |
| コマンド信号 (Command Signal) |
デジタルパケット |
| プロトコルタイプ (Protocol Type) |
RS485 非同期シリアル (8bit, 1 stop, パリティなし) |
| 物理接続 (Physical Connection) |
RS485 マルチドロップバス |
| 待機電流 (Standby Current) |
370 mA |
| フィードバック (Feedback) |
位置、速度、電流、温度、入力電圧 など |
ソフトウェア・開発環境の互換性
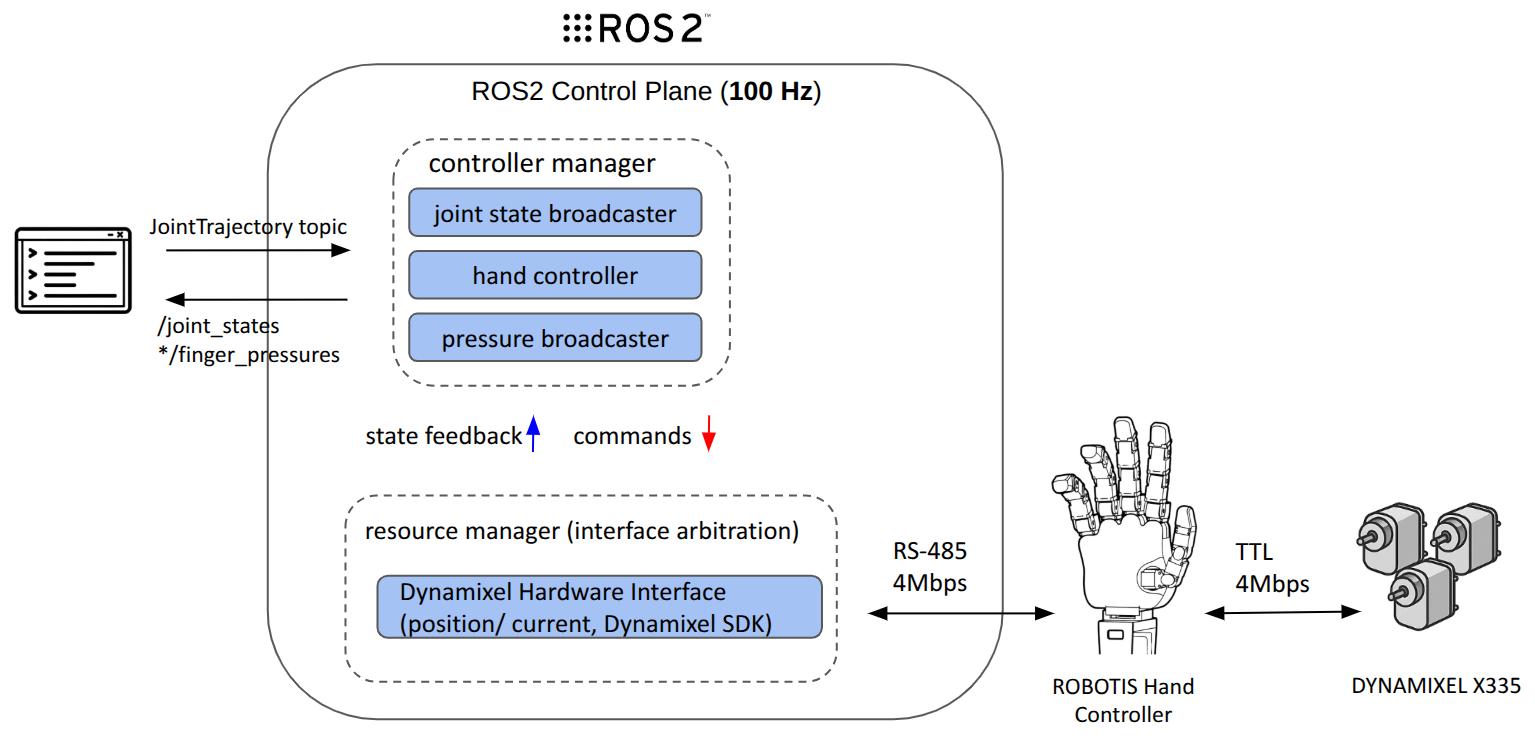
本製品(ROBOTIS Hand HX5-D20)は、リアルタイムでの高度な指先制御やAIモデルとの連携を想定して設計されています。既存の開発・研究環境へスムーズに組み込めるか、以下の互換性情報をあらかじめご確認ください。
最新のロボットオペレーティングシステムである「ROS 2 Jazzy」に対応しています。現行の主要な開発環境(HumbleやIronなど)から移行・統合を検討するエンジニアや研究者にとって、バージョン対応状況を客観的に評価するための重要な指標となります。
リアルタイム性とモジュール性に優れた「ros2_control framework」をベースに構築されています。これにより、自作のオリジナルコントローラーや既存のROSパッケージとの親和性が非常に高く、スムーズなシステム統合が可能です。
内容物一覧
| お届け内容 | 数量 | 備考 / 仕様 |
|---|---|---|
| HX5-D20-MRT (ロボットハンド本体・右手仕様) | 1個 | ※左手仕様は「HX5-D20-MLT」となります |
| FRP42_A110_K (フレーム/マウントパーツ) | 1個 | |
| Cable_4P (180mm) (4ピンロボットケーブル) | 1個 | |
| Cable_4P (300mm) (4ピンロボットケーブル) | 1個 | |
| Cable_KW30-3P-1C (35mm) (3ピンカスタムケーブル) | 1個 | |
| Cable_KW30-3P-1C (55mm) (3ピンカスタムケーブル) | 1個 | |
| Cable_KW30-3P-1C (80mm) (3ピンカスタムケーブル) | 1個 | |
| WB M3x8 (固定用ボルト) | 20個 |
本製品を動作させるための「SMPS(電源ユニット)」および「U2D2 PHB Set(通信コンバータ・電源ハブ基板)」は付属しておりません。必要に応じて別途お買い求めください。