
特徴
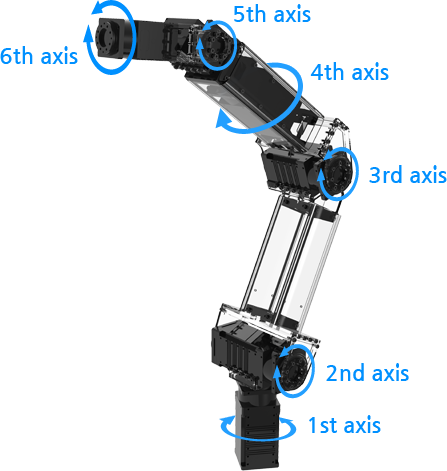
OpenMANIPULATOR-P(RM-P60-RNH)は、ROSに対応した可搬重量3kgを誇る、オープンソースのプログラマブルな高性能ロボットアームシステムです。
-
モジュール化されたプラットフォーム
メンテナンスやカスタマイズが容易なモジュール式プラットフォームを採用。外部制御ボックスが不要なため、省スペースで自由度の高いシステムを構築できます。
-
高精度アクチュエータ「DYNAMIXEL-P」を採用
高減速・低バックラッシのサイクロイド減速機と、絶対値磁気エンコーダを搭載。±0.05mmという卓越した位置反復精度と高い耐衝撃性を実現しています。
-
電流ベースのトルク制御
高速な電流センシングアルゴリズムとトリプルループ制御(位置・速度・電流フィードバック)により、高度なトルク制御が可能です。
システム構成時のご注意
【重要】電源・PCについて
本製品にパワーサプライ(電源)およびPCは付属していません。ご使用の環境に合わせて別途ご用意ください。
本製品にパワーサプライ(電源)およびPCは付属していません。ご使用の環境に合わせて別途ご用意ください。
パッケージ内容物一覧
| お届け内容 | 数量 | 備考 / 仕様 |
|---|---|---|
| OpenMANIPULATOR-P | 1個 | 組み立て済み |
| ハードケース (Hard Case) | 1個 | |
| U2D2 | 1個 | 通信コンバータ |
| 4P 拡張ハブ (4P Expansion Hub) | 1個 | |
| スペアケーブル (4P, 2P) | 1パック | |
| ネジセット | 1パック | WB M3x8 等 |
ハードウェア仕様
| 自由度 (DOF) |
6 |
| 可搬重量 (Payload) |
3 kg |
| 位置反復精度 (Repeatability) |
±0.05 mm |
| 各関節最高速度 (Speed) |
180 deg/sec |
| 自重 (Weight) |
5.5 kg |
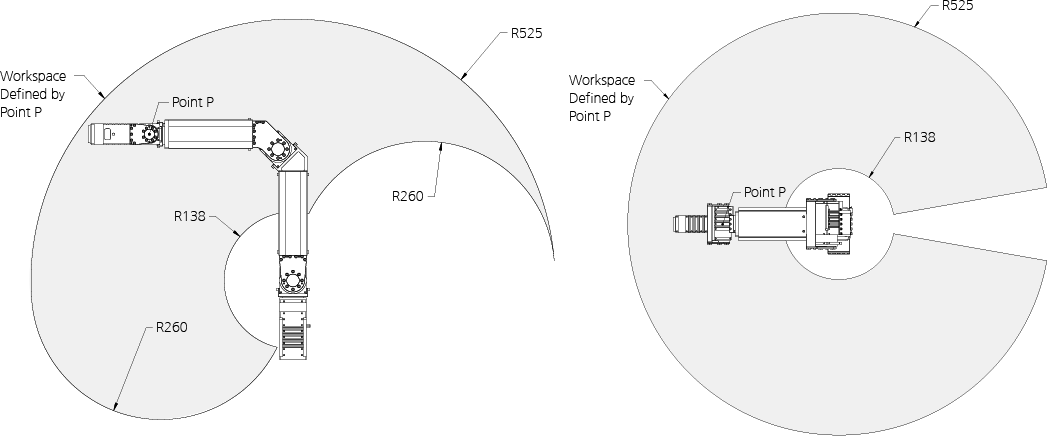
| 最大リーチ (Reach) |
645 mm |
| 定格電圧 (Rated Voltage) |
24 VDC |
| 通信方式 (Communication) |
RS-485 (Multi Drop Bus) |
| モーター出力 / 関節 (Motor Output) |
200W × 2個 / 100W × 2個 / 20W × 2個 |
ソフトウェア仕様と開発環境
本製品はROS (Ubuntu Linux)に対応しており、統合ソフトウェアに基づいた豊富な制御パッケージが提供されています。
| 提供機能・パッケージ | 概要 |
|---|---|
| OpenMANIPULATOR-P ライブラリ | 順・逆運動学(Kinematics)、軌道生成、およびDYNAMIXELコントローラ機能 |
| GUI プログラムパッケージ | 制御パラメータの設定およびモニタリング用 |
| MoveIt! パッケージ | 高度なモーションプランニング・マニピュレーション用 |
| Gazebo シミュレーション | 3D物理シミュレータ上での安全な動作検証用パッケージ |
| 遠隔操作サンプル | キーボードやジョイスティックによるモーションサンプル |
※ ロボットハンド(RH-P12)との同時購入について
別売のロボットハンド「RH-P12-RN」と本製品を同時にご購入いただいた場合、OpenMANIPULATOR-Pの専用ハードケース内に同梱してまとめて発送することが可能です。
工場出荷時デフォルト設定
通信設定(ID / Baud Rate)
工場出荷時の初期IDは「1」、通信速度は「57600 bps」に設定されています。お使いの開発環境やシステム構成に合わせて、DYNAMIXEL Wizard等のツール等で適宜変更してご使用ください。
