特徴
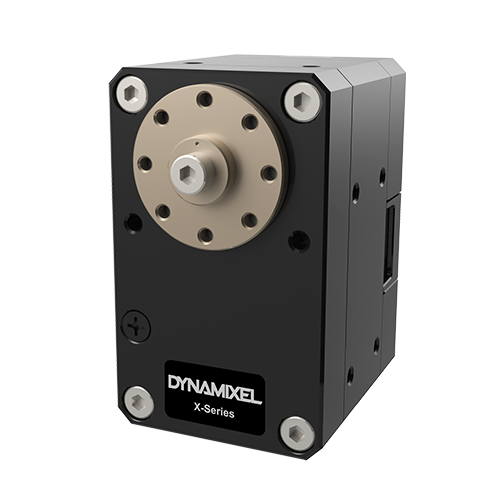
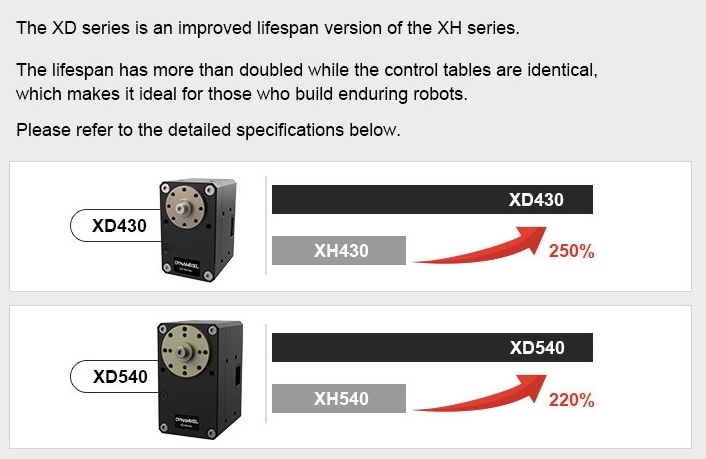
DYNAMIXEL XD430-T210-Rは、実績のあるXH430シリーズのコントロールテーブルや形状をそのまま継承しつつ、寿命を2.5倍(250%)以上に大幅向上させた高耐久XD(X-life Durable)シリーズのサーボアクチュエータです。Maxon社製コアレスモータ、フルメタルギア、高精度な非接触式絶対値エンコーダを搭載し、長期間にわたり安定した稼働が求められる業務用ロボットや研究開発に最適なモデルです。
-
XHシリーズを凌駕する驚異的な高寿命設計
制御コマンドや物理的な寸法、ネジ穴位置はXHシリーズと100%同一のまま、内部構造の最適化により耐久寿命が2倍以上に向上。メンテナンスサイクルを劇的に延伸します。
-
非接触式アブソリュートエンコーダによる超高精度制御
12bit(4,096分解能、0.088°/パルス)のams社製非接触絶対値エンコーダを採用。360°全域においてデッドゾーンのない精密な位置決め制御を可能にします。
-
多彩な6つの動作モードとPID制御
位置制御、速度制御、電流(トルク)制御、Extended位置制御(マルチターン・最大±256回転)、電流ベース位置制御、PWM制御を搭載。複雑な関節駆動やグリッパー、車輪駆動までマルチに対応します。
-
高信頼のRS485通信(Protocol 2.0標準対応)
高ノイズ環境下でも安定した通信を行えるRS485マルチドロップバスを採用し、最大4.5Mbpsの高速通信に対応。よりセキュアで多機能なDYNAMIXEL Protocol 2.0に準拠しています。
内容物一覧
| お届け内容 | 数量 | 備考 / 仕様 |
|---|---|---|
| DYNAMIXEL XD430-T210-R 本体 | 1個 | RS485モデル・高寿命(X-life Durable)仕様 |
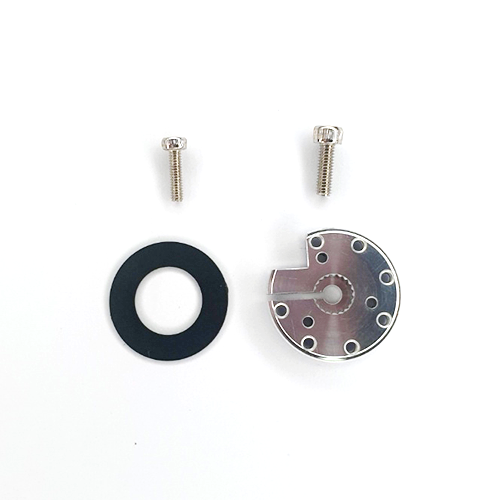
| HN12-N101 | 1個 | XD430 標準ホーン |
| スラストワッシャー(ホーン組付用) | 1個 | ホーンとケース間の摩擦防止 |
| Robot Cable-X4P 180mm | 1本 | RS485 4ピンケーブル(JST-JST) |
| Robot Cable-X4P (Convertible) 180mm | 1本 | RS485 4ピンケーブル(MOLEX-JST) |
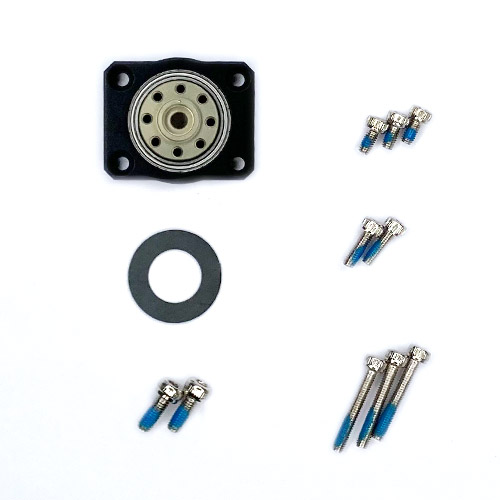
| レンチボルト WB M2×3 | 10本 | デュアルジョイント用 |
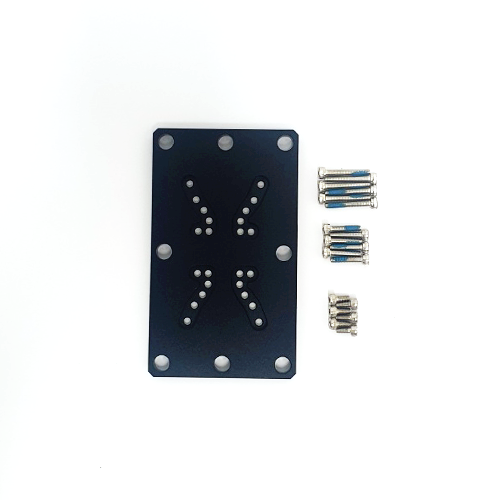
| レンチボルト WB M2.5×4 | 16本 | フレーム組立用(側面穴) |
| レンチボルト WB M2.5×6 | 1本 | XH430標準ホーン組付用 |
| レンチボルト WB M3×6 | 1本 | XD430ホーン組付用 |
| スペーサーリング | 8個 | フレーム組立用 |
※各種フレームやオプションアクセサリは必要に応じて別途お買い求めください。
詳細ハードウェア仕様(Specifications)
※ROBOTIS公式ドキュメント(docs.robotis.com)の仕様情報に基づいています。
| 商品名 (Model Name) |
DYNAMIXEL XD430-T210-R(RS485モデル) |
| MCU | ARM Cortex-M3 (72 MHz, 32 bit) |
| 重量 (Weight) |
85 g |
| 寸法 (Dimensions) |
28.5mm × 46.5mm × 34.0mm |
| 分解能 (Resolution) |
4,096 pulse/rev(0.088°/パルス) |
| バックラッシュ (Backlash) |
15 arcmin(0.25°) |
| 位置センサー (Position Sensor) |
非接触式アブソリュートエンコーダ(12bit、360°) メーカー:ams、型番:AS5045 |
| 搭載モータ (Motor) |
コアレスモータ(maxon製) |
| 減速比 (Gear Ratio) |
212.6 : 1 |
| ストールトルク (Stall Torque) |
2.2 N·m(11.1V時 / 1.2A) 2.5 N·m(12.0V時 / 1.3A)※推奨電圧 3.1 N·m(14.8V時 / 1.5A) |
| 無負荷回転数 (No Load Speed) |
46 rev/min(11.1V時) 50 rev/min(12.0V時)※推奨電圧 62 rev/min(14.8V時) |
| 動作モード/可動範囲 (Operating Mode) |
電流制御 / 速度制御 / 位置制御(0〜360°) / 拡張位置制御(±256回転) / 電流ベース位置制御 / PWM制御 |
| ラジアル荷重 (Radial Load) |
40 N(ホーンから10mm離れた位置) |
| アキシャル荷重 (Axial Load) |
20 N |
| 動作温度 (Operating Temperature) |
-5°C ~ +80°C |
| 動作電圧 (Input Voltage) |
10.0V ~ 14.8V (推奨電圧: 12.0V) |
| 制御アルゴリズム (Control Algorithm) |
PID制御 |
| 物理接続・通信プロトコル (Protocol & Connection) |
RS485 マルチドロップバス 非同期シリアル通信 (8bit, 1stop, No Parity) |
| 通信速度 (Baud Rate) |
9,600 bps ~ 4.5 Mbps |
| ID設定範囲 (ID Range) |
253 ID (0 ~ 252) |
| プロトコルバージョン (Protocol Version) |
DYNAMIXEL Protocol 2.0(標準対応) |
| フィードバック機能 (Feedback) |
位置、速度、電流、リアルタイムティック、軌跡、温度、入力電圧 など |
| スタンバイ電流 (Standby Current) |
40 mA |
| ギヤ材質 (Gear Material) |
フルメタルギヤ |
| ケース材質 (Case Material) |
金属(前面・中央)/ エンジニアリングプラスチック(背面) |
主要な動作モード(Operating Mode)
XD430-T210-Rは、用途に合わせてコントロールテーブル内の「Operating Mode(11)」を切り替えることで、以下の多彩な制御に対応します。
| 動作モード | 概要 |
|---|---|
| 位置制御モード Position Control Mode |
通常の関節動作に適した、0〜360°の単回転範囲内での高精度位置決め制御(デフォルト)。 |
| 拡張位置制御モード Extended Position Control Mode |
±256回転(512ターン)までのマルチターン位置制御。減速ギヤ付き外部機構や巻取り機構に最適。 |
| 電流ベース位置制御モード Current-based Position Control Mode |
位置を正確に制御しつつ、同時に加えられる最大トルク(電流制限)も制御する高度なモード。ロボットハンド等の把持部に。 |
| 速度制御モード / PWM制御モード Velocity / PWM Control Mode |
ホイール駆動に適したエンドレスの速度指定回転、または印加電圧(PWMデューティ)の直接操作。 |
※ プロファイルの生成と制御について
位置制御および拡張位置制御モードでは、目標値までの急激な加減速による衝撃を緩和するため、内部で台形・三角形等の独自の「移動プロファイル」を自動生成させることが可能です。これによりロボットへの物理的負荷と振動を大幅に低減できます。
通信方式とコネクタピンアサイン
XD430-T210-Rは「RS485 マルチドロップバス(4ピン)」を採用しています。同一バス上に最大253個のデバイスをデイジーチェーン接続可能です。
| ピン番号 | ピン名(信号) | 備考 |
|---|---|---|
| 1 | GND | グランド線 |
| 2 | VDD | 電源電圧(10V〜14.8V / 推奨12.0V) |
| 3 | DATA+ | RS485 差動通信用(+側) |
| 4 | DATA- | RS485 差動通信用(-側) |
※ コネクタ・配線仕様
TTL通信モデル仕様の製品(T端子モデル等)とは配線・コネクタ形式が異なります。結線ミスによる基板破損を防ぐため、必ずメーカー適合ピンアサインをご確認の上ご使用ください。
- ・ ハウジング: JST EHR-04
- ・ 基板側ヘッダー: JST B4B-EH-A
- ・ 推奨ワイヤゲージ: 21 AWG
ご使用上の注意
-
XHシリーズと完全な互換性をもつコントロールテーブル
制御コマンドのアドレスや構成は従来のXH430シリーズと全く共通です。すでにXH430(RS485仕様)向けに制作されたプログラムやファームウェアコードをそのまま書き換えることなくシームレスに置き換え可能です。
-
ホロウバックケースへのケーブル配線について
背面ホロウ(中空)部にケーブルを通す際は、ケーブルをよく整理してから背面ケースを組付けてください。ケーブルが絡んだ状態でケースを閉じると、ケーブルが挟み込まれ通信エラーの原因となります。また、ホロウ部には必ず1本のみ通してください。2本以上通すとケーブルが損傷します。
-
実用負荷の選定に関するご注意
カタログスペックのストールトルク(12.0V時2.5 N·m)は瞬間的に発生可能な最大静止トルクです。長寿命性能を発揮させつつ安定して持続稼働させるためには、設計時の定格実用負荷に十分な余裕(安全マージン)を持って組み込んでください。
-
自己保護機能(シャットダウン)とエラー対応
内部温度が制限値(初期値 80°C)を超えた場合、または異常な電圧降下・過負荷を検知した場合は過熱アラームが働き、LEDが毎秒点滅してモータ出力が自動的に遮断されます。この状態になった場合は負荷を取り除いて電源を切り、20分以上冷却させてから再起動してください。
-
通電中(稼働時)の配線操作厳禁
システム通電中にDYNAMIXEL用通信・電源配線ケーブルの抜き差しを行う行為は、逆起電力や予期せぬショート、内部ICの永久的な物理破損を引き起こす恐れがあるため、絶対に行わないでください。
適合コントローラ・インターフェース
コントローラ:OpenRB-150, OpenCR など(※RS485通信回路を備えたもの)
インターフェース:U2D2(PC直接制御用シリアルコンバータ)
工場出荷時設定(初期設定)
ID:1
通信速度(Baud Rate):57,600 bps
プロトコル:Protocol 2.0
※ ID・通信速度および動作パラメーターなどの各種設定は、専用の管理ソフト「DYNAMIXEL Wizard 2.0」等でお好みに合わせて自由に変更・保存可能です。