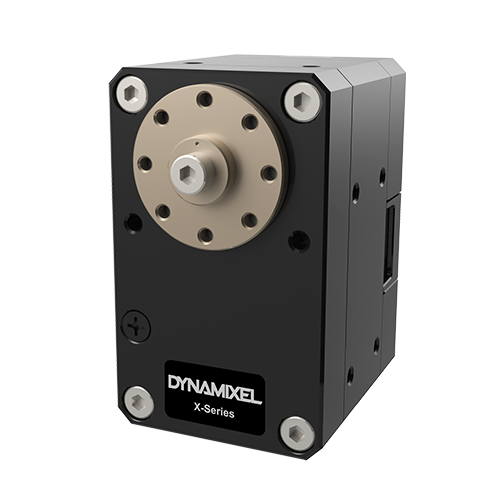
特徴
DYNAMIXEL XD430-T350-Rは、XD430-T350-Rは、重量わずか85gのコンパクトなスマートサーボです。XHシリーズの後継にあたるXDシリーズは、コントロールテーブルに互換性を保ちながら寿命が2倍以上に延長されており、長期稼働が求められるロボットシステムに最適です。maxon製コアレスモータとフルメタルギヤを採用し、推奨電圧12.0Vで最大3.4 N·mの高トルクを実現します。
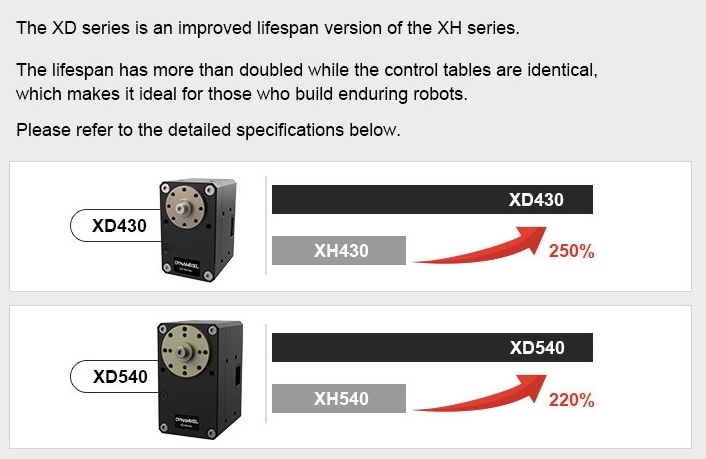
- XHシリーズ比2倍以上の長寿命設計
XDシリーズはXHシリーズの改良版として開発され、コントロールテーブルの互換性を維持しながら寿命が2倍以上に延長されています。既存のXHシリーズからの置き換えもスムーズに行えます。
- maxon製コアレスモータ × フルメタルギヤ
高品質なmaxon製コアレスモータと353.5:1のフルメタルギヤを組み合わせ、推奨電圧12.0V時に最大3.4 N·mのストールトルクを発揮します。耐久性と出力性能を高い次元で両立しています。
- 非接触式アブソリュートエンコーダによる高精度センシング
ams製AS5045を採用した非接触式アブソリュートエンコーダ(12bit、360°)により、4096 pulse/revの高分解能な位置検出を実現します。電源投入直後から絶対位置を把握できます。
- 6種類の豊富な動作モード
電流制御・速度制御・位置制御(0〜360°)・拡張位置制御(マルチターン)・電流ベース位置制御・PWM制御の6モードに対応しています。用途に応じた柔軟な制御が可能です。
- RS-485マルチドロップ通信対応
RS-485マルチドロップバスにより、最大253台(ID: 0〜252)のDYNAMIXELを1本のバスに接続可能です。通信速度は9,600 bpsから最大4.5 Mbpsまでの広範囲に対応しています。
内容物一覧
| お届け内容 | 数量 |
|---|---|
| DYNAMIXEL XD430-T350-R 本体 | 1個 |
| HN12-N101(サーボホーン) | 1個 |
| Robot Cable-X4P 180mm | 1本 |
| Robot Cable-X4P (Convertible) 180mm | 1本 |
| ボルト M2.6×5 TAP | 5本 |
| ボルト M2×5 | 5本 |
| ボルト M2.5×14 | 5本 |
| スペーサー | 5個 |
※各種フレームやオプションアクセサリは必要に応じて別途お買い求めください。
詳細ハードウェア仕様(Specifications)
※ROBOTIS公式ドキュメント(docs.robotis.com)の仕様情報に基づいています。
| 制御コア (MCU) | ARM Cortex-M3 (72 MHz, 32bit) |
| 位置センサ (Position Sensor) | 非接触式アブソリュートエンコーダ (12bit, 360°) メーカー:ams (www.ams.com)、型番:AS5045 |
| モーター種類 (Motor) | コアレスモータ(maxon製) |
| 通信速度 (Baud Rate) | 9,600 bps ~ 4.5 Mbps |
| 制御アルゴリズム (Control Algorithm) | PID制御 |
| 分解能 (Resolution) | 4,096 pulse/rev (0.088°/パルス)、バックラッシュ:15 arcmin (0.25°) |
| 動作モード (Operating Modes) | 電流制御モード / 速度制御モード / 位置制御モード (0〜360°) / 拡張位置制御モード(マルチターン)/ 電流ベース位置制御モード / PWM制御モード(電圧制御モード) |
| 重量 (Weight) | 85g |
| 外形寸法 (Dimensions) | 28.5 × 46.5 × 34.0 [mm] |
| 減速比 (Gear Ratio) | 353.5 : 1 |
| ストールトルク (Stall Torque) | 3.1 [N.m] (at 11.1 [V], 1.2 [A], 2.583 [Nm/A]) 3.4 [N.m] (at 12.0 [V], 1.3 [A], 2.615 [Nm/A]) 4.2 [N.m] (at 14.8 [V], 1.5 [A], 2.800 [Nm/A]) |
| 無負荷回転数 (No Load Speed) | 27 [rev/min] (at 11.1 [V]) 30 [rev/min] (at 12.0 [V]) 37 [rev/min] (at 14.8 [V]) |
| 動作環境温度 (Operating Temperature) | -5 ~ +80 [°C] |
| 入力電圧 (Input Voltage) | 10.0 ~ 14.8 [V](推奨:12.0 [V]) |
| コマンド信号 (Command Signal) | デジタルパケット |
| 物理接続 (Physical Connection) | RS-485 マルチドロップバス、RS-485 非同期シリアル通信 (8bit, 1stop, No Parity) |
| ID設定範囲 (ID) | 253 ID (0 ~ 252) |
| フィードバック情報 (Feedback) | 位置、速度、電流、リアルタイムティック、軌跡、温度、入力電圧 など |
| ケース材質 (Case Material) | 金属(前面・中央部)/ エンジニアリングプラスチック(背面) |
| ギヤ材質 (Gear Material) | フルメタルギヤ |
| 待機電流 (Standby Current) | 40 [mA] |
| ラジアル荷重 (Radial Load) | 40 [N] (10 [mm] away from the horn) |
| アキシャル荷重 (Axial Load) | 20 [N] |
主要な動作モード(Operating Mode)
XD430-T350-Rは、用途に合わせてコントロールテーブル内の「Operating Mode(11)」を切り替えることで、以下の多彩な制御に対応します。
| 動作モード | 概要 |
|---|---|
| 位置制御モード Position Control Mode |
通常の関節動作に適した、0〜360°の単回転範囲内での高精度位置決め制御(デフォルト)。 |
| 拡張位置制御モード Extended Position Control Mode |
±256回転(512ターン)までのマルチターン位置制御。減速ギヤ付き外部機構や巻取り機構に最適。 |
| 電流ベース位置制御モード Current-based Position Control Mode |
位置を正確に制御しつつ、同時に加えられる最大トルク(電流制限)も制御する高度なモード。ロボットハンド等の把持部に。 |
| 速度制御モード / PWM制御モード Velocity / PWM Control Mode |
ホイール駆動に適したエンドレスの速度指定回転、または印加電圧(PWMデューティ)の直接操作。 |
| 電流制御モード Current Control Mode |
速度・位置フィードバックなしで電流(トルク)のみを直接指定。グリッパー等の力制御に。 |
※ プロファイルの生成と制御について
位置制御および拡張位置制御モードでは、目標値までの急激な加減速による衝撃を緩和するため、内部で台形・三角形等の独自の「移動プロファイル」を自動生成させることが可能です。これによりロボットへの物理的負荷と振動を大幅に低減できます。
通信方式とコネクタピンアサイン
XD430-T350-Rは「RS485 マルチドロップバス(4ピン)」を採用しています。同一バス上に最大253個のデバイスをデイジーチェーン接続可能です。
| ピン番号 | ピン名(信号) | 備考 |
|---|---|---|
| 1 | GND | グランド線 |
| 2 | VDD | 電源電圧(10.0 ~ 14.8 [V] ( Recommended : 12.0 [V] )) |
| 3 | DATA+ | RS485 差動通信用(+側) |
| 4 | DATA- | RS485 差動通信用(-側) |


※ コネクタ・配線仕様
本製品はXシリーズ共通のJSTコネクタ(4ピン)を採用しています。旧来のMOLEXコネクタを使用するコントローラ(OpenCM、USB2Dynamixelなど)との接続には変換ケーブルをご使用ください。
- ・ ハウジング: JST EHR-04
- ・ 基板側ヘッダー: JST B4B-EH-A
- ・ 推奨ワイヤゲージ: 21 AWG
ご使用上の注意
- 動作中の接触を避ける
動作中は指・手・足などの身体部位をサーボ本体や可動部に近づけないでください。重大な怪我につながる危険があります。
- 異常時はただちに電源を切断する
異臭・異音・煙が発生した場合は、直ちに動作を停止し電源を遮断してください。そのまま使用し続けると、火災や故障の原因となります。
- 規定の動作環境を厳守する
動作電圧(10.0〜14.8V)・動作温度(-5〜+80°C)など、仕様に定められた動作環境を必ず遵守してください。範囲外での使用は製品の損傷や誤動作につながります。
- 通電中のケーブル抜き差し禁止
電源が供給された状態でDYNAMIXELのケーブルを接続・切断しないでください。内部回路の損傷や通信エラーの原因となります。
- 分解・改造・強い衝撃を与えない
製品を分解・改造したり、落下させたり強い衝撃を与えたりしないでください。製品の破損や誤動作、怪我の原因となります。
適合コントローラ・インターフェース
コントローラ:OpenRB-150, OpenCR など(※RS485通信回路を備えたもの)
インターフェース:U2D2(PC直接制御用シリアルコンバータ)
工場出荷時設定(初期設定)
ID:1
通信速度(Baud Rate):57,600 bps
プロトコル:Protocol 2.0
※ ID・通信速度および動作パラメーターなどの各種設定は、専用の管理ソフト「DYNAMIXEL Wizard 2.0」等で自由に変更・保存可能です。