
- 生産終了
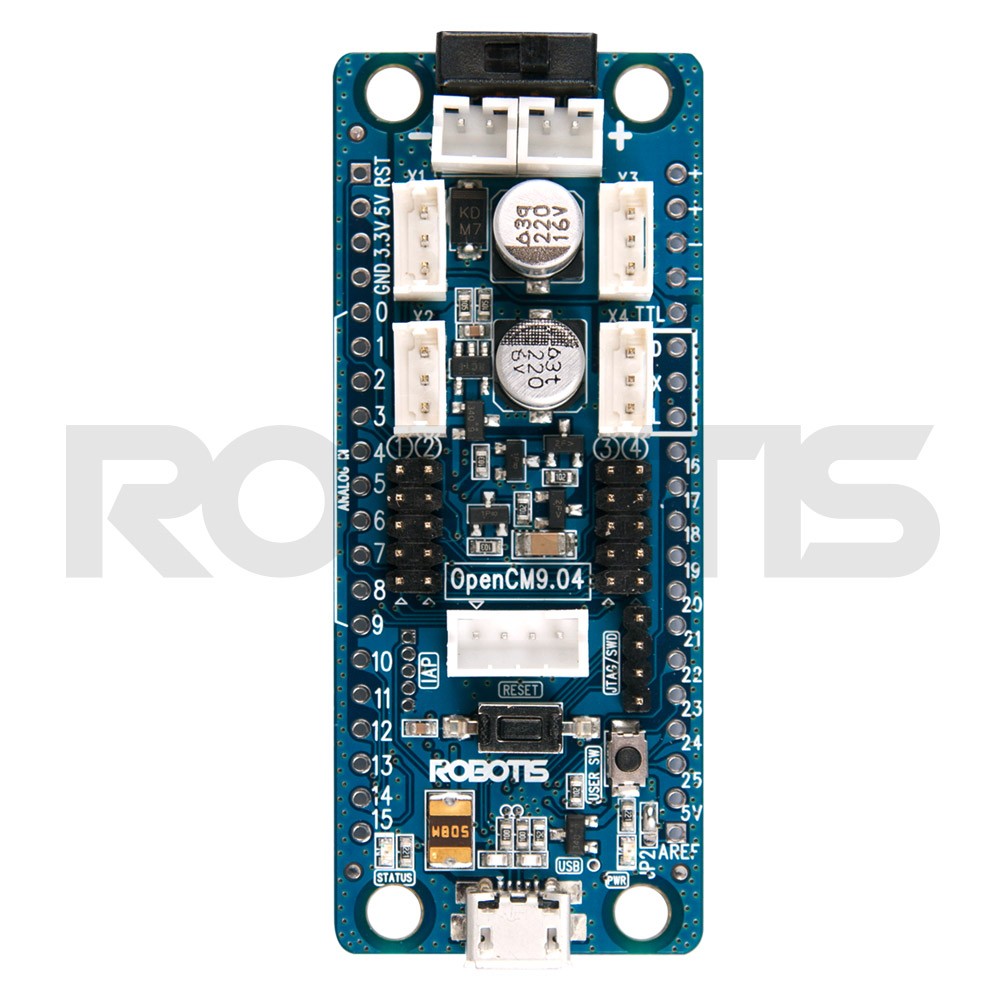
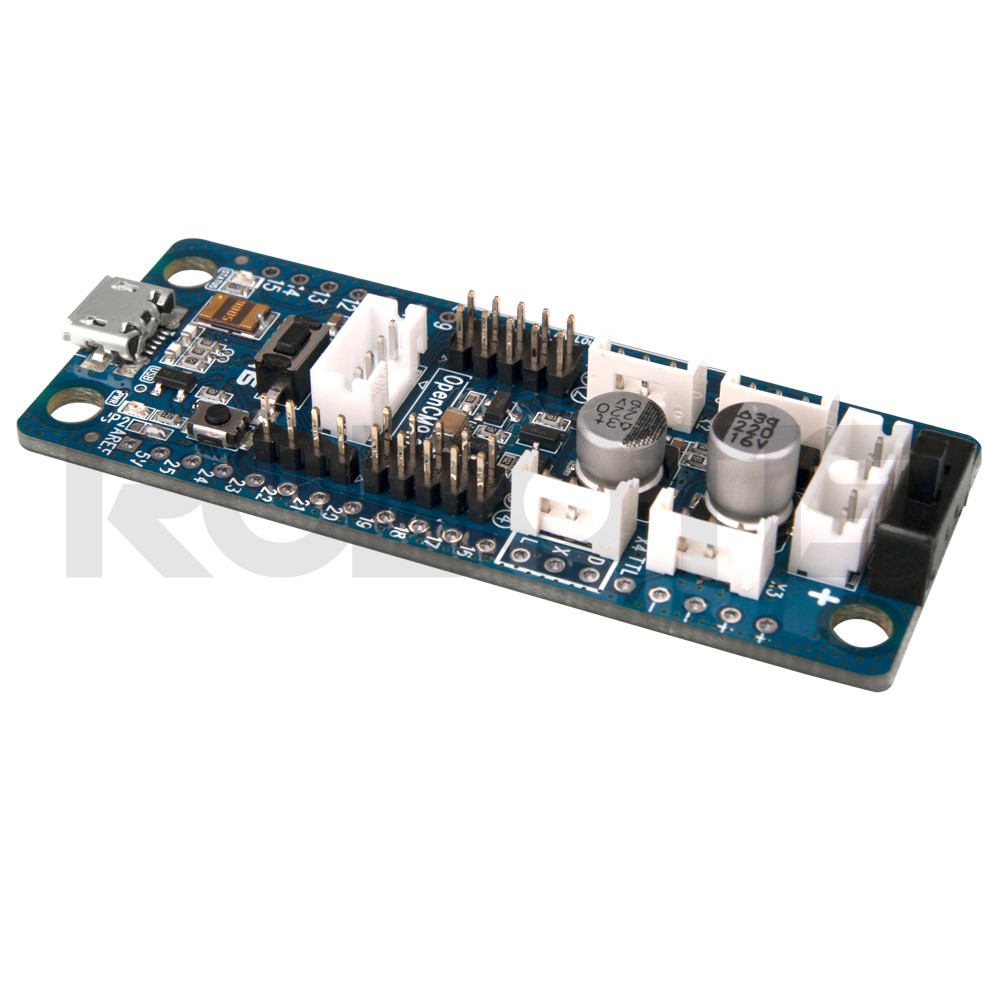
OpenCM9.04-C (生産終了・在庫限り)
STM32 Cortex-M3搭載Arduino互換機、シリアル3系統、シールド無しでDYNAMIXELが動作可能
概要
ボード上にDYNAMIXEL接続ポート(DXL接続ポート)が4つあります。DYNAMIXELと各種コマンドを送受信するためのArduinoライブラリが用意されており、Arduino IDEでロボットの開発に対応。
(Arduino IDEにはボードマネージャからOpenCM9.04がインストールできます)
GUI開発環境 R+Task3.0によるローコードでの開発に対応。
データシート・リファレンスマニュアル、他
・OpenCM9.04本体 (ROBOTIS e-manual, 日本語)・OpenCM 485 EXP拡張基板 (ROBOTIS e-manual, 日本語)
・Arduino IDE リファレンスマニュアル (ROBOTIS e-manual, 英語)
・Dynamixel2Arduinoライブラリー (Arduino公式ページ)
・GUI開発環境 R+Task3.0 リファレンスマニュアル (ROBOTIS e-manual, 英語)
対応機種
【OpenCM9.04-C本体のDXL接続ポートに直接接続可能なDYNAMIXEL】| OpenCMの種類 | 対応機種 |
|---|---|
| OpenCM9.04-C(XL-320用コネクタ付) [902-0084-040] | XL-320 |
| OpenCM9.04-C-EH(Xシリーズ対応JSTコネクタ付) [JP2-0084-042] | X330 series, X430 series(TTLモデル), X540 series(TTLモデル) |
【OpenCM9.04-A本体に対応コネクタを装着することで接続可能なDYNAMIXELとコネクタの種類】
| 対応機種 | コネクタの種類 |
|---|---|
| AX series | Molex : Mini-SPOX 50-37-5033(2.5mmピッチ 3ピン) |
| MX series TTL(3ピン)モデル | Molex : Mini-SPOX 50-37-5033(2.5mmピッチ 3ピン) |
| X330 series | JST : EHR-3(2.5mmピッチ 3ピン) |
| X430 series TTL(3ピン)モデル | JST : EHR-3(2.5mmピッチ 3ピン) |
| X540 series TTL(3ピン)モデル | JST : EHR-3(2.5mmピッチ 3ピン) |
【OpenCM 485 EXP Boardを接続することで使用可能なDYNAMIXEL】
- 全機種のDYNAMIXEL ※X430 series, X540 series,P series(DYNAMIXEL Pro Plus)は、変換ケーブルが必要です。