※ご予約・取り置きのご注文を優先しているため、人気商品は入荷日時点で在庫がない場合がございます。ご不明な点はお気軽にお問い合わせください。
TURTLEBOT3 Burger
 |

|

| 注意事項 | 組立キット この商品は、ユーザー自身による組み立てが必要です。 必要な工具は同梱されています。はんだ付けの必要は無いです。 |
|---|
ROS公式チュートリアルロボット
TurtleBot3(タートルボット3)は、ロボット オペレーティング システムROS及びGazeboシミュレーターの管理団体であるOpen RoboticsとロボットメーカーROBOTIS(ロボティズ)が共同開発したROS1,ROS2入門のためのコンピューターとLiDARを搭載したオープンソースの移動ロボットプラットフォームです。無償公開のeマニュアル(Webドキュメント、チュートリアル)とサンプルプログラムによりROS1,ROS2の最新バージョンのインストールと学習・評価、応用開発が可能です。
ROS及びGazeboへの貢献
TurtleBot3の売上の一部はOpen Roboticsの収益になります。TurtleBot3を購入することでROS及びGazeboの開発、維持管理に貢献することが出来ます。特徴
TurtleBot3 Waffle Piは、Open RoboticsとROBOTISが共同開発した、ROS1およびROS2入門のためのコンピューターとLiDARを搭載したオープンソースの移動ロボットプラットフォームです。
-
世界で最も人気のあるROSプラットフォーム
TurtleBotは、教育と研究のための世界で最も人気のあるオープンソースロボットです。無償公開のeマニュアルとサンプルプログラムにより最新バージョンの学習・評価が可能です。
-
手頃な価格と高い拡張性
教育とプロトタイプ研究開発のための最も手頃なプラットフォームであり、さまざまなSBC、センサー、モーター、柔軟な構造を使用してアイデアを拡張できます。
-
オープンソース(ハードウェア&ソフトウェア)
ユーザーのためのさまざまなソフトウェアだけでなく、回路図、PCBガーバー、BOM、および3D CADデータが完全に公開されています。
-
強力なセンサーラインアップ
高利用のRaspberry Pi Camera、強化された360° LiDAR、9軸慣性測定ユニット(IMU)、および正確なエンコーダーを備えています。
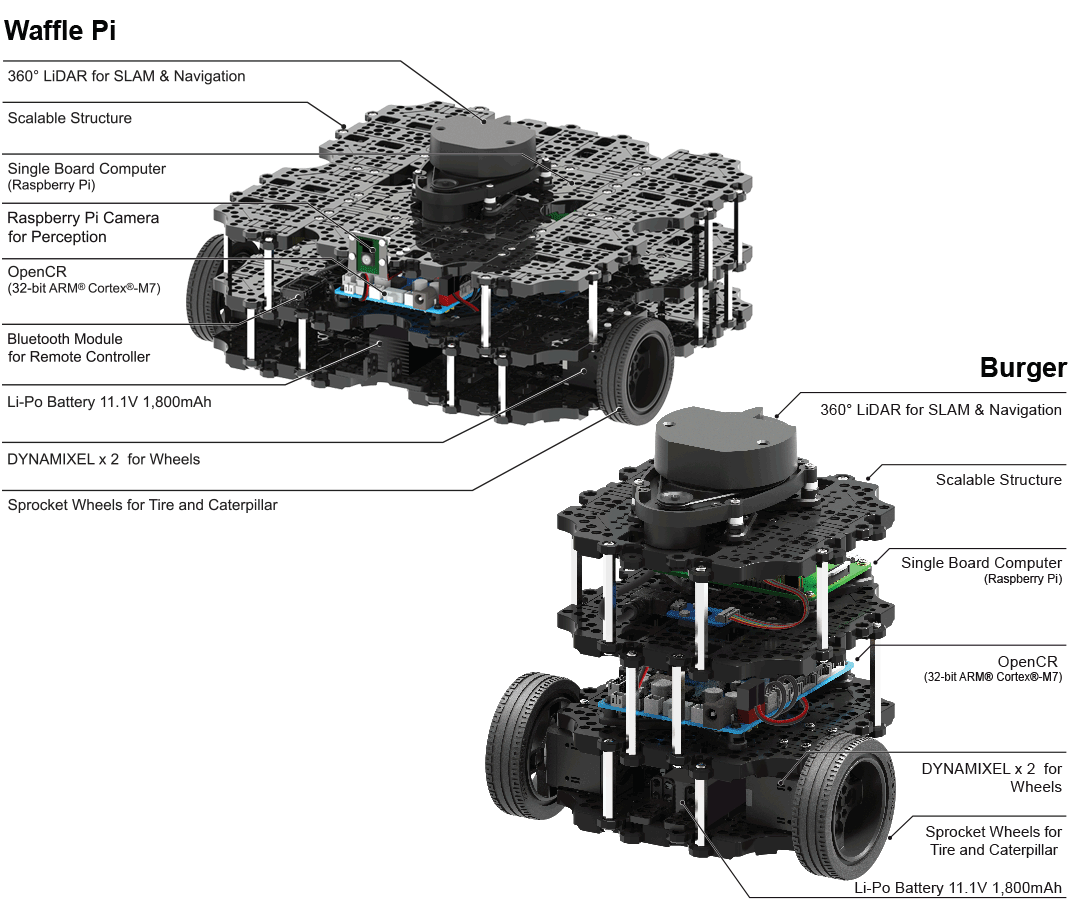
主要構成コンポーネント
本商品はユーザー自身による組み立てが必要なキットです。必要な工具は同梱されており、はんだ付けは不要です。
TurtleBot3の売上の一部はOpen Roboticsの収益となり、ROSおよびGazeboの開発、維持管理に貢献することができます。
内容物一覧
| お届け内容 | 数量 | 備考 / 仕様 |
|---|---|---|
| TURTLEBOT3 Burger RPi4 4GB [JP] (ACアダプター付属) | 1個 | 品番: 901-0118-501 |
| ACアダプター | 1個 | 付属 |
| 組み立て用専用工具 | 1式 | 同梱されています |
ハードウェア仕様
| 最高速度 (Max Velocity) |
並進: 0.22 m/s / 回転: 2.84 rad/s (162.72 deg/s) |
| 最大積載量 (Max Payload) |
15.0 kg |
| サイズ・重量 (Size / Weight) |
138mm × 178mm × 192mm / 1 kg (+ SBC + Battery + Sensors) |
| 稼働・充電時間 (Operating / Charging) |
動作時間: 約2時間30分 / 充電時間: 約2時間30分 |
| アクチュエータ (Actuator) |
DYNAMIXEL XL430-W250-T × 2 |
| メインボード / SBC (Controller / SBC) |
OpenCR1.0 / Raspberry Pi 4 (4GB) [Jetson Nanoもサポート] |
搭載センサーとアプリケーションについて
TurtleBot3 Burgerには、周囲の環境認識や自律移動、遠隔操作を可能にする「強力なセンサー群」があらかじめ標準搭載されています。
| 搭載センサー | 仕様・特徴 |
|---|---|
| 360° LiDAR (LDS-03) | 測定距離: 0.05m ~ 12m / スキャン周波数: 10Hz / サンプリングレート: 4kHz(固定) |
| Raspberry Pi Camera Module V2 | センサー: Sony IMX219 / 画素数: 8 Megapixels / ビデオモード: 最大1080p30 |
| 制御ボード内蔵センサー | OpenCR基板上に「3軸ジャイロスコープ」および「3軸加速度センサー」を内蔵 |
※ 多彩なROSアプリケーションに対応
標準公開されているサンプルプログラムやチュートリアルを利用して、以下の高度な機能をすぐに学習・検証できます。
- ① SLAM (位置特定と地図作成)
- ② Navigation (自律移動・経路計画)
- ③ Teleoperation (PCやコントローラーによる遠隔操作)
- ④ Autonomous Driving / Manipulation (自動運転研究やアーム連携)
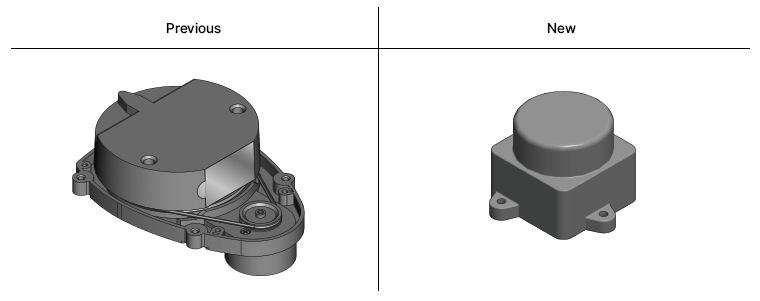
LDSセンサーの変更について
2025年10月より、TurtleBot3で使用しているLDSセンサーを変更いたしました。
本変更は、主要部品の安定供給を確保し、製品の性能と信頼性を適切に維持するために実施しております。
詳細については、Turtlebot3 (ROBOTIS DOCS)を参照してください。
ご使用上の注意
-
バッテリーの取り扱いについて
ロボットの駆動には専用のLi-Poバッテリー(11.1V 1800mAh)等を使用します。過放電や充電方法の誤りはバッテリーの劣化や故障の原因となりますので、必ず専用の充電器(LBC-010)を使用し、管理に注意してください。