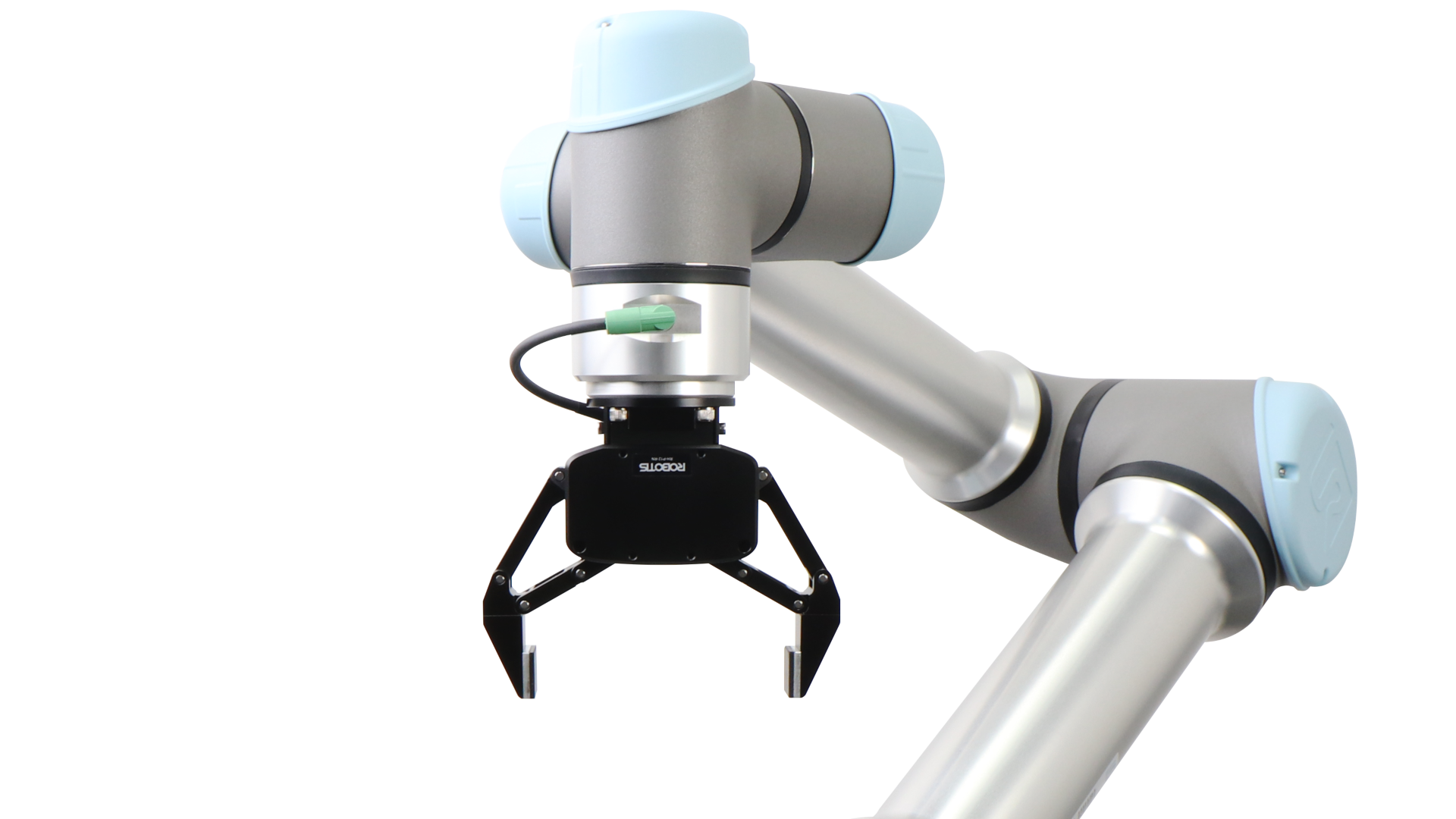
ROBOTIS HAND RH-P12-RN-UR
UR eシリーズにそのままボルトオンできるアダプティプ機構内蔵ロボットハンド
| 価格 |
オープン価格
価格詳細は、販売代理店もしくはロボティズeショップにお問い合わせください。 |
|---|---|
| 納期 |
受注生産品
標準納期: 20営業日 |

特徴
ROBOTIS HAND RH-P12-RN-URは、Universal Robots eシリーズにそのままボルトオンで搭載できる、アダプティブ機構内蔵の2指多機能ロボットハンド(1自由度)です。
-
Universal Robots e-Seriesに完全対応
UR3e、UR5e、UR10e、UR16eのツールフランジに直接マウントでき、専用のURCapプラグインを使用して直感的に操作が可能です。
-
適応型グリッピング(Adaptive Gripping)
受動関節(Passive Joints)を採用した独自の設計により、丸型、角型、不定形など、様々な形状の対象物に追従して柔軟に掴むことができます。
-
高度な電流制御(Force Control)
10WのDCモーターを搭載し、電流制御をベースにした位置・トルク制御が可能です。割れやすい卵のような素材から硬い金属まで、材質に合わせて最適な力加減で把持できます。
-
軽量かつ高出力(Light Weight & High Power)
ロボットハンド自体の重量はわずか500gと非常に軽量でありながら、最大170Nの強力な把握力を誇り、最大5kgまでの可搬重量(Payload)に対応します。
-
先端フィンガーのカスタマイズ性
先端のフィンガーチップは脱着が簡単な構造になっており、ワークの形状に合わせた自作のカスタムチップへ容易に交換が可能です。
パッケージ内容一覧
本パッケージには、RH-P12-RN本体およびUniversal Robots eシリーズに即座に取り付けるための専用パーツがすべて同梱されています。
| お届け内容 | 数量 | 備考 / 仕様 |
|---|---|---|
| RH-P12-RN | 1個 | 組立済みロボットハンド本体 |
| UR Mounting Frame | 1個 | URロボットアーム接続用マウントフレーム |
| Cable Cover Frame | 1個 | ケーブル保護用カバーフレーム |
| Robot Cable 180mm (URe Exclusive) | 1個 | Universal Robots eシリーズ専用接続ケーブル |
| ボルト類 (WB M3x4) | 4個 | 取付用ネジ |
| ボルト類 (WB M6x8) | 6個 | 取付用ネジ |
| ボルト類 (WB M3x8) | 6個 | 取付用ネジ |
| 六角レンチ (Hex Key) | 2種 | 組み立て・調整用レンチ一式 |
| USB Memory | 1個 | UR Capプラグインソフトインストール用メモリ |
| QuickStart | 1個 | クイックスタートガイド |
ハードウェア仕様
| メインMCU (MCU) |
ST CORTEX-M4 (STM32F405 @ 168Mhz, 32bit) |
| 位置センサー (Position Sensor) |
非接触式アブソリュートエンコーダ (12bit, 360°) |
| コアモーター (Motor) |
コアレスモーター (Coreless) |
| 通信速度 (Baud Rate) |
9,600 bps ~ 10.5 Mbps |
| 制御アルゴリズム (Control Algorithm) |
PID制御 |
| 最小分解能 (Degree of Precision) |
0.088° |
| 動作モード (Operating Mode) |
電流制御モード / 電流ベース位置制御モード |
| 自重 (Weight) |
500g |
| 開閉ストローク (Stroke) |
0 ~ 106mm |
| 減速比 (Gear Ratio) |
1181 : 1 |
| 最大把握力 (Max Gripping Force) |
170N |
| 推奨可搬重量 (Recommended Payload) |
5kg |
| 動作環境温度 (Operating Temp) |
-5°C ~ 55°C |
| 定格電圧 (Nominal Voltage) |
24V |
| 通信プロトコル (Protocol Type) |
RS485 非同期シリアル通信 (8bit, 1stop, No Parity) / デジタルパケット |
| 物理接続レイアウト (Physical Connection) |
RS485 マルチドロップ BUS |
| 設定可能ID数 (ID Range) |
0 ~ 252 |
| 各種フィードバック (Feedback) |
位置(Position)、速度(Velocity)、電流(Current)、温度(Temperature)、入力電圧(Input Voltage) 等 |
| 材質・構造 (Material) |
フルメタルギヤ、メタルボディ |
| 待機電流 (Standby Current) |
30mA |
工場出荷時設定と対応製品
本製品は、箱から出して対応ロボットへマウント後、すぐにご使用いただけるよう初期設定されています。
| 設定項目 | 工場出荷時デフォルト設定 |
|---|---|
| 初期ID | 1 |
| 初期通信速度 (Baud Rate) | 57,600 bps |
■ 対応するUniversal Robotsアーム一覧
本製品は以下のUR eシリーズモデルに対して完全な互換性を持ち、ボルトオンで接続できます。
- UR3e
- UR5e
- UR10e
- UR16e
※ご購入後、運用のシステム環境に合わせて必要に応じIDや通信速度(Baud Rate)の変更を行ってください。
ご使用上の注意
-
仕様変更による最大開閉ストロークの変更
フィンガーツリップ(指先部)の耐久性向上を目的とした製品の形状変更に伴い、最大開閉ストローク仕様が従来の109mmから106mmへと変更になっております。(2019年11月4日弊社出荷分以降のすべてのロットに適用されています)旧型からのリプレイスやプログラムの移行時には稼働閾値にご注意ください。
-
納期に関するご注意
本製品は「受注生産品」となります。決済確認または正式ご注文が確定してから、日本国内標準納期として20営業日(約1ヶ月)ほどの製造・お取り寄せ期間を頂戴しております。お急ぎの場合は事前の在庫・納期確認をお願いいたします。