OpenRB-150
特徴
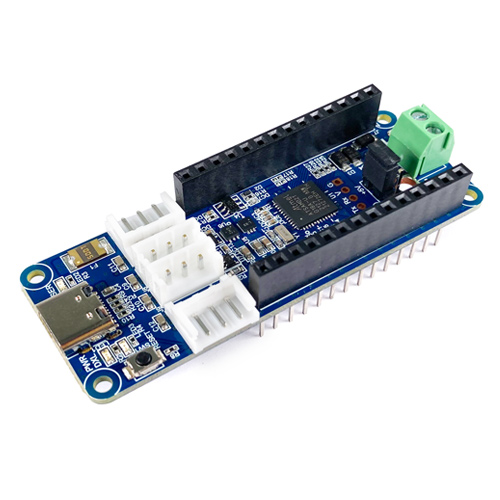
OpenRB-150は、Arduinoと互換性のある新しいオープンソースの組み込みコントローラーです。従来のArduino MKRシリーズと同じピン配置・フォームファクタを採用しているため、豊富なアクセサリ群をそのまま活用でき、使い慣れたArduino IDEでのプログラミングが可能です。
-
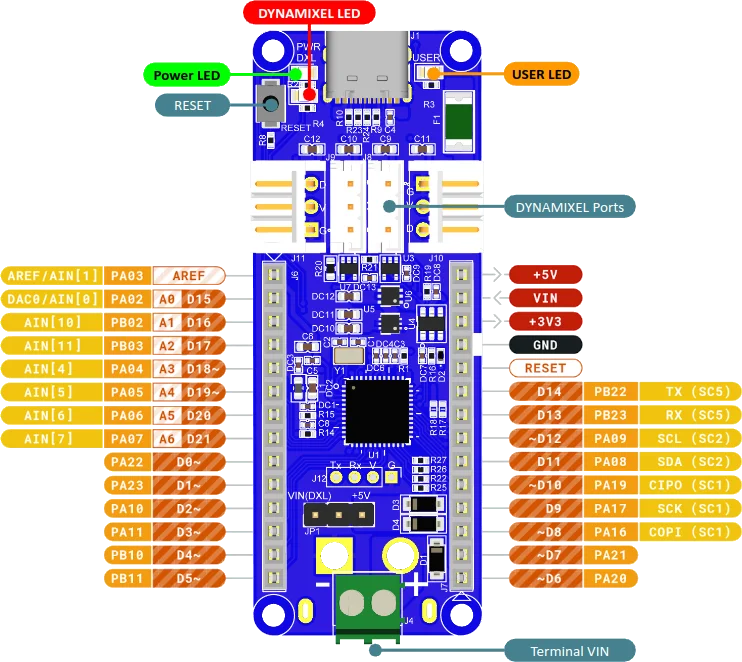
4基のDYNAMIXEL専用TTLポートを搭載
専用のDYNAMIXELポート(TTL)を4基標準装備。外部に複雑な回路を追加することなく、直接スマートサーボを接続して制御できます。
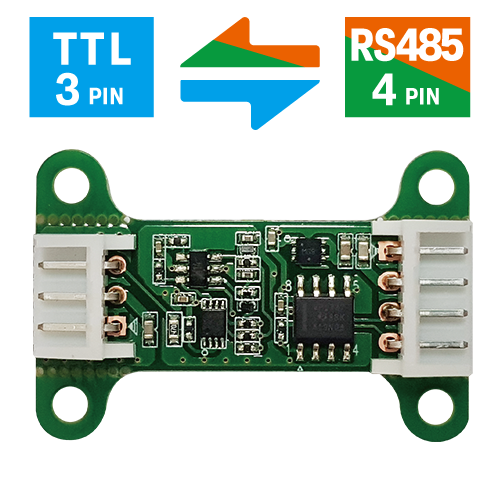
※Xシリーズなどの「RS-485(4ピン)モデル」を使用する場合は、別売の「DYNAMIXEL Communication Bridge」が必要です。 -
DYNAMIXEL Wizard 2.0に対応
製品テストやキャリブレーションを行うための強力なソフトウェア「DYNAMIXEL Wizard 2.0」に対応しており、初期セットアップや動作確認が簡単に行えます。
-
柔軟な電源マネジメント(FETスイッチ搭載)
DYNAMIXELポートへの電力供給は、基板裏面のFET(電子スイッチ)を介してプログラム上でON/OFF制御が可能です。安全かつスマートな電源管理を実現します。
対応製品と開発環境について
OpenRB-150は、以下のDYNAMIXELシリーズおよび開発ソフトウェアに対応しています。
| 項目 | 対応製品 / 動作条件 |
|---|---|
| 対応DYNAMIXEL |
Xシリーズ / MXシリーズ / AXシリーズ / Pシリーズ(標準ポートはTTL 3ピン仕様です) ※Xシリーズ等のRS-485(4ピン)通信モデルの接続には、別売の「DYNAMIXEL Communication Bridge」が必要です。買い忘れにご注意ください。 ※24V駆動モデルを接続する場合は、別途モータ側への外部電源接続が必要になります。 |
| サポートソフトウェア |
・Arduino IDE(プログラム開発用環境) ・DYNAMIXEL Wizard 2.0(設定・テスト用ツール) |
※ DYNAMIXEL Wizard 2.0 使用時の注意
OpenRB-150をDYNAMIXEL Wizard 2.0と接続して使用するには、専用のファームウェア(usb_to_dynamixel スケッチ)を本体に書き込む必要があります。このスケッチは、OpenRBボードマネージャーパッケージ内にサンプルとして同梱されています。
内容物一覧
| お届け内容 | 数量 | 備考 / 仕様 |
|---|---|---|
| OpenRB-150 コントローラー本体 | 1個 | Arduino互換 / DYNAMIXEL用TTL4ポート搭載 |
| 電源接続用 ターミナルブロック | 1個 | 基板に実装済み(外部給電用) |
初めてDYNAMIXELを触る方へ
本商品はコントローラー基板のみの単体販売です。各種DYNAMIXELサーボや専用通信ケーブル、必要な電源周りのアクセサリ一式がまとめて揃う、便利なOpenRB-150 スターターキットもご用意しています。
ハードウェア仕様
| マイコン (Microcontroller) |
SAMD21 Cortex-M0+ 32bit ARM® MCU (48 MHz) |
| 基板電源入力 (Board Power Supply) |
USB 3.0 (5.0V) / 端子台・XT60 (3.7V ~ 12.6V) |
| 対応バッテリー (Supported Battery) |
Li-Po 1~3セル (3.7V~11.1V) ※XT60コネクタ背面取付可能 |
| 回路動作電圧 (Circuit Operating Voltage) |
3.3 V ※I/Oピンの許容電圧も最大3.3Vです(超過時は基板が破損します) |
| DYNAMIXELポート電流 (DC Current for DXL) |
最大 3,000 mA |
| 入出力ピン数 (Digital I/O / PWM) |
デジタル I/O: 24ピン / PWM: 12ピン |
| フラッシュメモリ / SRAM (Flash / SRAM) |
256 KB (ブートローダー用8KB含む) / 32 KB |
| 寸法 (Dimension) |
25mm × 66mm |
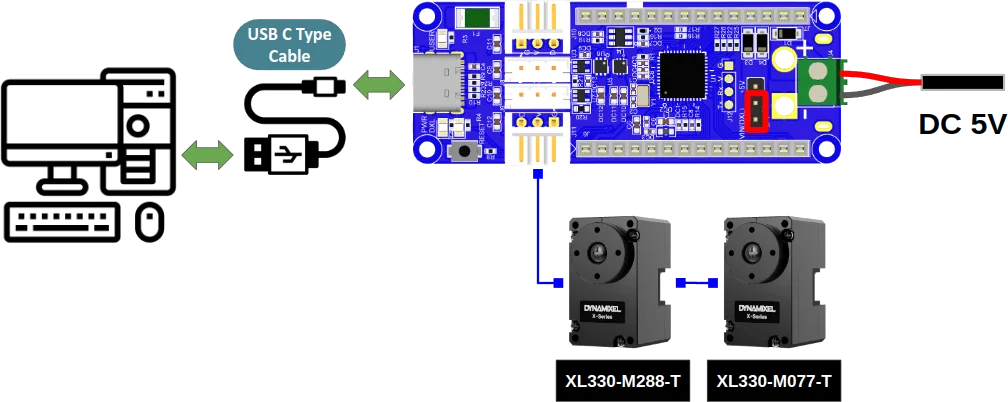
DYNAMIXELを接続する場合の配線例
急速な動きや高トルクを必要とするアプリケーションでは、USB給電ではなく必ず「Terminal VIN(端子台)」から外部電源を供給してください。USB給電のみで高負荷なモータ駆動を行うと、PCのUSBポートの破損やリブートを引き起こす恐れがあります。
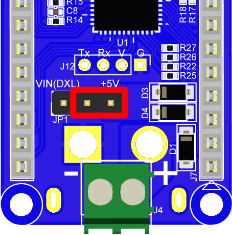
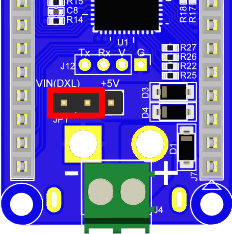
▼ Power Source Jumper(電源ソース設定)
【重要】故障防止のための注意事項
ジャンパー設定を誤ると、基板のショートや故障の原因となる可能性があります。必ず電源の供給方法に応じて、以下の通り正しく設定してください。

OpenRB-150は3種類の電源から供給可能です。コントローラーおよびDYNAMIXELへ正しく電源供給するために、電源ソースジャンパーを適切に設定してください。
ご使用上の注意
-
I/Oピンの許容電圧(最大3.3V厳守 / 5V非対応)
本コントローラーの信号回路動作電圧は3.3Vです。5Vトレラントではないため、デジタル・アナログ入出力ピンに対して3.3Vを超える電圧を印加すると、基板が永久に破損する原因となります。他5V系マイコンやセンサーと混在させる場合は必ずロジックレベルコンバータを経由させてください。
-
電源の逆接続禁止(極性の確認)
端子台や外部配線から電源を供給する際は、プラス(+)とマイナス(-)の極性を必ず事前に確認してください。極性を誤って通電した場合、コントローラーが故障します。
-
通電中のケーブル抜き差し禁止
電源が供給されている(通電状態の)ときは、DYNAMIXELアクチュエータの通信ケーブルを絶対に抜き差ししないでください。回路ショートや故障を誘原する恐れがあります。
-
リセット時のアクチュエータの挙動
基板上のリセットボタンを押してマイコンを再起動すると、接続されているDYNAMIXELへの給電スイッチ(FET)も同時にリセットされ、一時的に電源がオフになります。機材の脱落や予期せぬ怪我を防ぐため、必ずアクチュエータが安全な状態・姿勢にあることを確認してからリセット操作を行ってください。