※ご予約・取り置きのご注文を優先しているため、人気商品は入荷日時点で在庫がない場合がございます。ご不明な点はお気軽にお問い合わせください。

OMY-AI3M
Ideal Robot Platform for AI & Robotics Research
| 価格 | ログインもしくはお問合せください。 |
|---|---|
| 納期 | 受注後4~5か月間 |
特徴
ROBOTIS OMYは、Physical AI(物理AI)研究およびインテリジェントな自動化のために設計された6自由度(6-DOF)の革新的なロボットマニピュレータです。高パフォーマンスなDYNAMIXEL-Yシリーズを搭載し、人間の実演を通じた効率的なスキル獲得をサポートします。
-
Physical AIベースのスキル獲得
人間のデモンストレーション(実演)を通じて、新しいスキルを直感的に学習。複雑なプログラミングなしで、多様なタスクや環境への適応を可能にします。
-
リアルタイムな高精度マニピュレーション
作業スペースをリアルタイムで認識し、学習されたポリシー(学習モデル)に基づいて動作。応答性と信頼性が求められる動的なタスクに最適です。
-
DYNAMIXEL-Y搭載 6-DOFアーム
高トルク・高分解能を誇る「DYNAMIXEL-Y」シリーズを採用。6自由度全体でスムーズかつ精密な動きを実現し、研究から産業用途まで高い再現性を提供します。
-
エンドエンドの模倣学習パイプライン
実演によるデータ収集からポリシーの推論まで、模倣学習(Imitation Learning)の全プロセスをサポート。インテリジェントな動作の訓練と展開がシームレスに行えます。
-
モジュール設計 & ROS 2ネイティブ対応
拡張性の高いモジュール構造により、各種センサーやツールの柔軟な統合が可能。ROS 2に完全対応しているため、リアルタイム制御やオープンソースのエコシステムを最大限に活用できます。
-
コンパクトで開発者に優しい設計
軽量なフレームと直感的なインターフェースを備え、研究室や教室、自動化ラインへの導入に最適。高度な制御ポリシーのテストや展開を素早く繰り返すことができます。
OMY シリーズ ラインナップ
OMYシリーズは、遠隔操作やマニピュレーションの用途に合わせて、複数のシステム構成(バリエーション)を提供しています。
| モデル名 | 構成 / 特徴 | 主な用途・備考 |
|---|---|---|
| OMY-L100 | 遠隔操作用 リーダー(Leader)ユニット | 他のOMYユニットをリモート制御するための直感的なインターフェースを提供します。 |
| OMY-F3M | 2指グリッパー & Intel RealSense D405 深層カメラ搭載 | 物体のハンドリング(マニピュレーション)や視覚認識タスクに最適です。 |
| OMY-3M | ベース構成(グリッパーなし) | 一般的なモーションコントロールや、独自のカスタムエンドエフェクタの統合に適しています。 |
| OMY-AI3M |
テレオペレーション完全セット (OMY-L100 リーダー + OMY-F3M フォロワー) |
模倣学習(Imitation Learning)や遠隔操作アプリケーションのための完全なリーダー・フォロワーシステム。 |
使用事例(産業アプリケーション)
6自由度AIマニピュレータ「OMY」は、スケーラブルなPhysical AI研究向けに設計されており、以下のような様々な産業アプリケーションや環境への適用・実世界学習が可能です。
(Manufacturing assembly tasks)
工場や製造ラインにおける精密な組み立て作業や、AIを活用したタスク自動化への応用が可能です。
(Warehouse operations)
物流倉庫内でのピッキング、仕分け、搬送補助など、自動化・省人化を目的としたシステムに統合できます。
(Research environments)
構造化・非構造化環境を問わず、直感的で安全なデータ収集を行い、最先端のロボティクス・AI研究を支援します。
OMYの活用・学習システム
各産業アプリケーションの具体的な動作ビデオは現在準備中です。最新のアップデートは公式YouTubeチャンネルをご確認ください。
OMYは、リーダーフォロワー遠隔操作(Leader-Follower teleoperation)、衝突を考慮したモーション、重力補償制御などを通じて、実世界での効率的な学習を可能にします。
デモンストレーション動画一覧
| 動画タイトル / 概要 | デモンストレーション動画(再生) |
|---|---|
|
AI MANIPULATOR #1: Start Physical AI Research
OMYとPhysical AIツール群を使用した、ロボティクス学習とPhysical AI研究のスタートアップガイドです。 |
|
|
AI MANIPULATOR #2: Sim2Real with OMY
IsaacSim環境でのトレーニングから、実世界(リアル環境)のロボットへ展開するSim2Realのデモです。 |
|
|
AI MANIPULATOR #3: Basic Operation
OMYマニピュレータを動かすための、基本操作やセットアップに関するデモンストレーションです。 |
|
内容物一覧
OMYハードウェアプラットフォーム の標準パッケージに含まれる構成品およびお届け内容の一覧です。
| お届け内容 / 構成品 | 数量 | 備考 / 仕様 |
|---|---|---|
| OMY-F3M (フォロワーアーム) | 1 | 6-DOF ロボットアーム本体(カメラ・ハンド搭載) |
| OMY-L100 (リーダーデバイス) | 1 | 6-DOF 遠隔操作用デバイス本体 |
| USB Hub 3.0 | 1 | 周辺機器接続用ハブ |
| USB cable | 1 | 通信用データケーブル |
| SMPS for OMY-F3M | 1 | フォロワーアーム専用ACアダプタ(24V用) |
| SMPS for OMY-L100 | 1 | リーダーデバイス専用ACアダプタ(12V用) |
| E stop | 1 | 安全運用のための非常停止スイッチ |
ハードウェア仕様
フォロワーアーム(OMY-F3M)およびリーダーデバイス(OMY-L100)の主要スペック比較一覧です。
| 仕様項目 (Parameter) | [フォロワー] OMY-F3M | [リーダー] OMY-L100 |
|---|---|---|
| 自由度 (DOF) | 6 | 6 |
| 可搬重量 (Payload) | 3 [kg] | — (手動操作用) |
| リーチ幅 (Reach) | 580 [mm] | 560 [mm] |
| 重量 (Weight) | 13.5 [kg] | 1.46 [kg] |
| 動作電圧 (Operating Voltage) | 24 [VDC] | 12 [VDC] |
| 繰り返し精度 (Repeatability) | ±0.05 [mm] | — |
| 関節可動範囲 (Joint Range) | Joint 1, 2 : ±360° Joint 3 : ±150° Joint 4, 5, 6 : ±360° |
Joint 1 : ±180° Joint 2 : -70° ~ +100° Joint 3, 4, 5, 6 : ±180° Joint 7 : -90° ~ +60° |
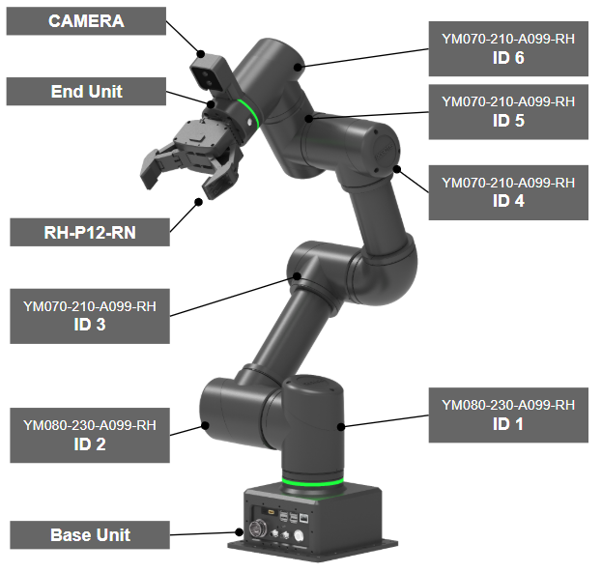
| 搭載アクチュエータ規格 (DYNAMIXEL Spec) | Joint 1, 2 : YM080-230-A099-RH Joint 3, 4, 5, 6 : YM070-210-A099-RH |
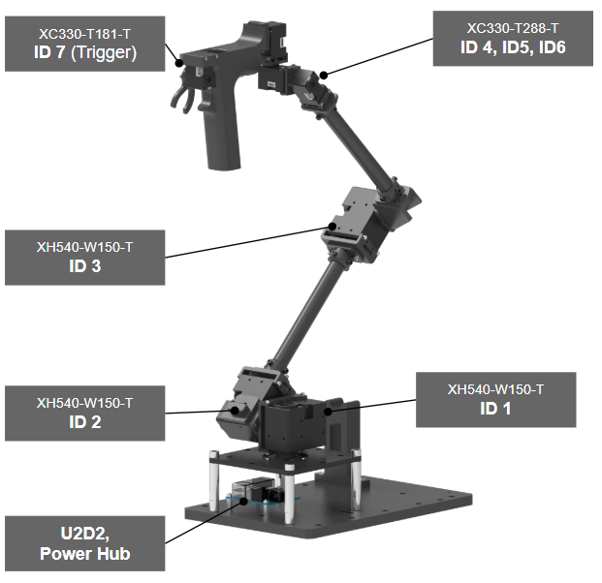
Joint 1, 2, 3 : XH540-W150 Joint 4, 5, 6 : XC330-T288 Joint 7 : XC330-T181 |
| ホスト通信方法 (Host Interface) | Ethernet | U2D2 (USB 2.0) |
| 内部通信規格 (Communications) | RS485 (4 [Mbps]) | TTL Multidrop Bus (4 [Mbps]) |
| エンドエフェクタ / カメラ (Hand / Camera) | ロボットハンド: RH-P12-RN カメラ: Intel RealSense D405 |
— |