
- 24V
- 電流制御
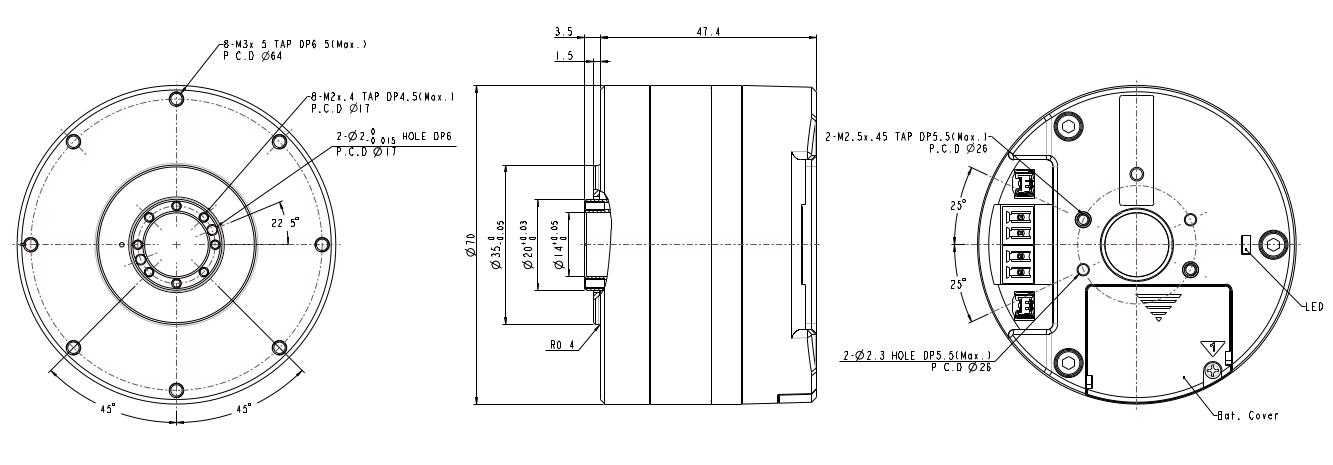
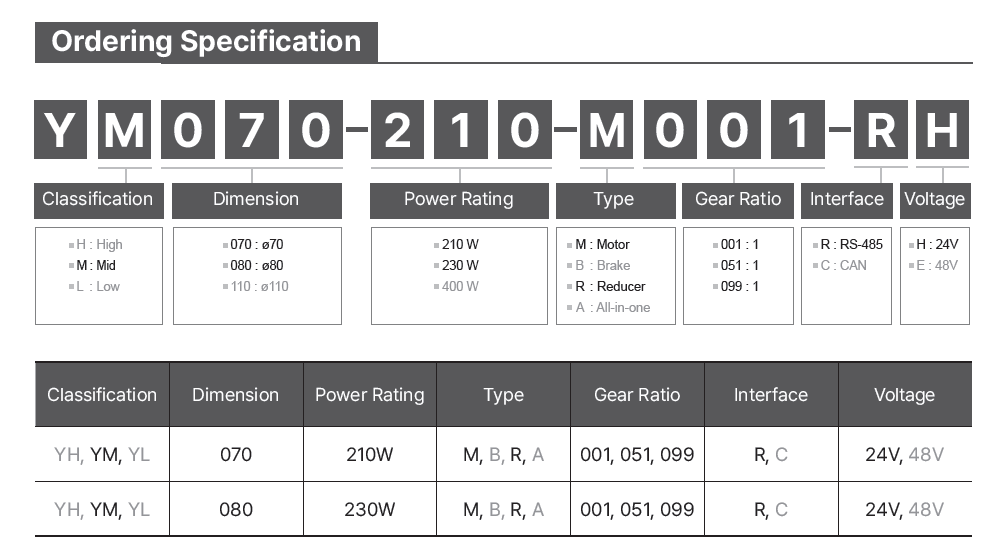
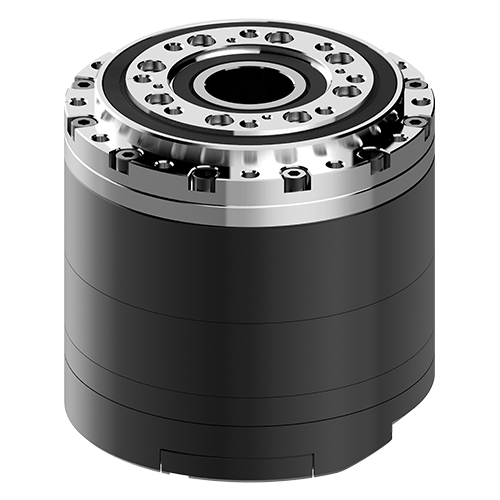
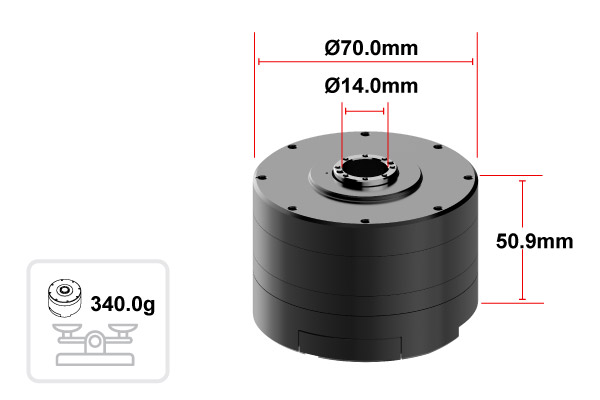
YM070-210-M001-RH
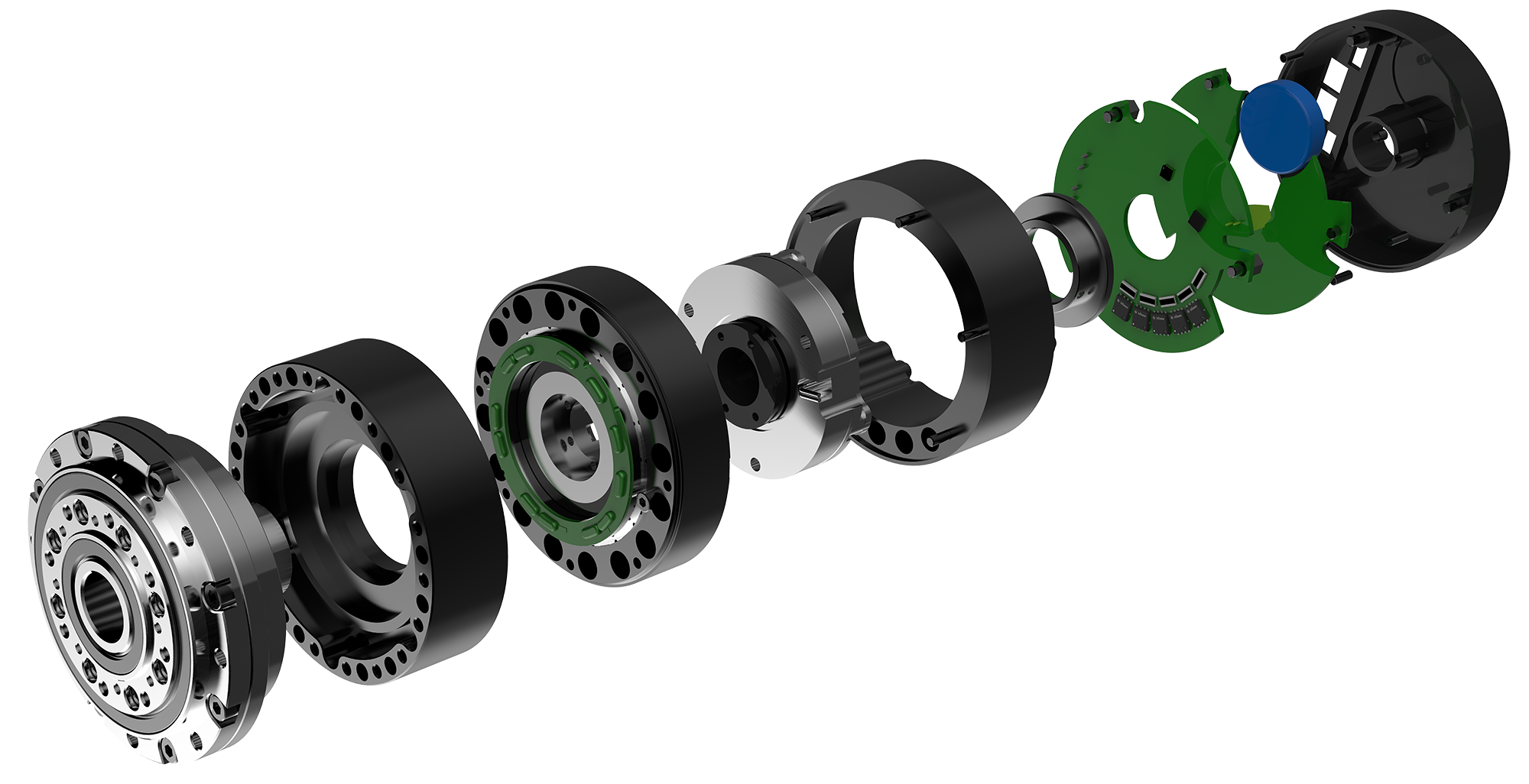
Product Features
- High Performance Frameless motor
- Multi-turn Absolute Encoder
- Compact & Simple Design with Hollow Shaft
- Dynamic Motor Controller
| 商品管理番号 | 8809677576618 |
|---|---|
| 発売時期 | 2024/04/01 |
| 納期 | 受注生産(約2か月) |
| 購入方法 | お問合せフォームよりお問合せください。 |
商品説明
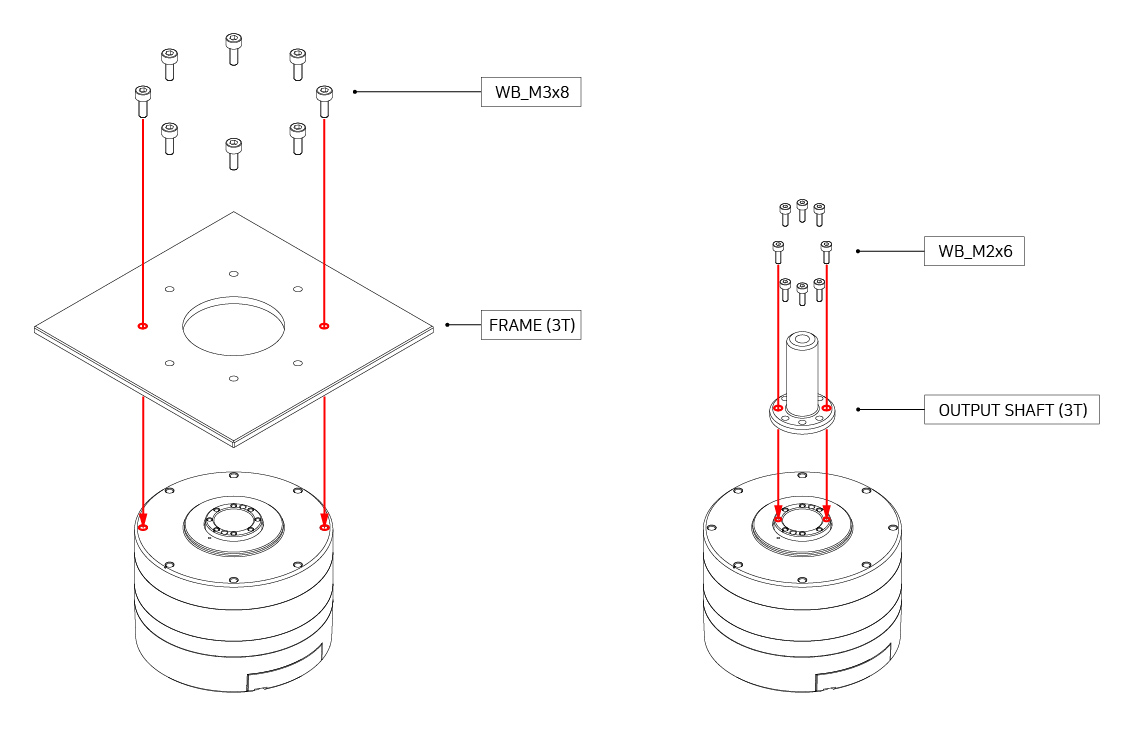
YM070-210-M001-RHは減速機を含まず、目的に応じて減速機、リニアアクチュエータ、サーボシリンダーなど様々な製品と組み合わせて使用することができます。
特徴
- 中空シャフトを持つ高性能フレームレスモーター
- 電流検出に基づくトルク制御
- 位置、速度の信頼性と精度を向上させるPID制御
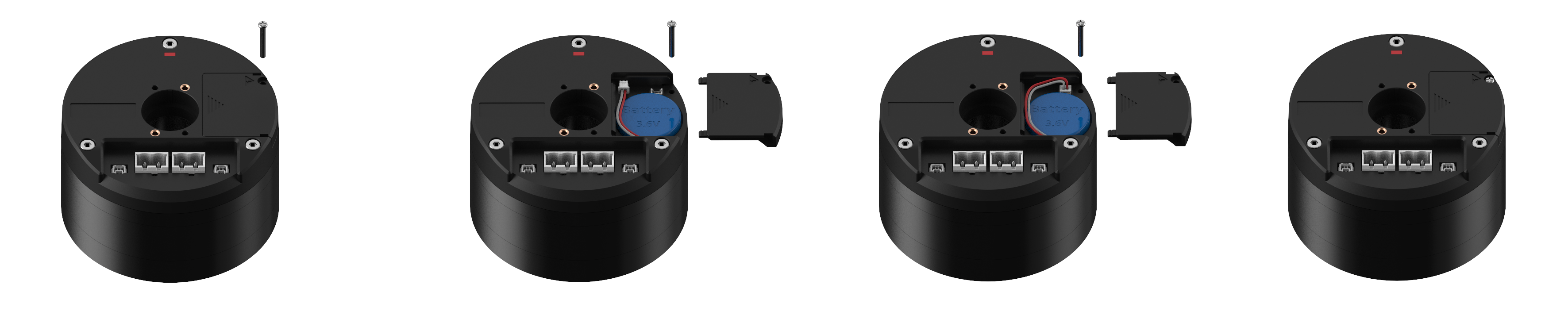
- 統合された絶対磁気エンコーダーと交換可能なバッテリーにより、完全な電源オフ後もマルチターン位置情報を保持(バックアップバッテリー付き)
- 高耐久性のための金属製ハウジング
- モジュラー構成により、自由度の異なるアプリケーションを簡単に作成可能