

- 24V
- 電流制御
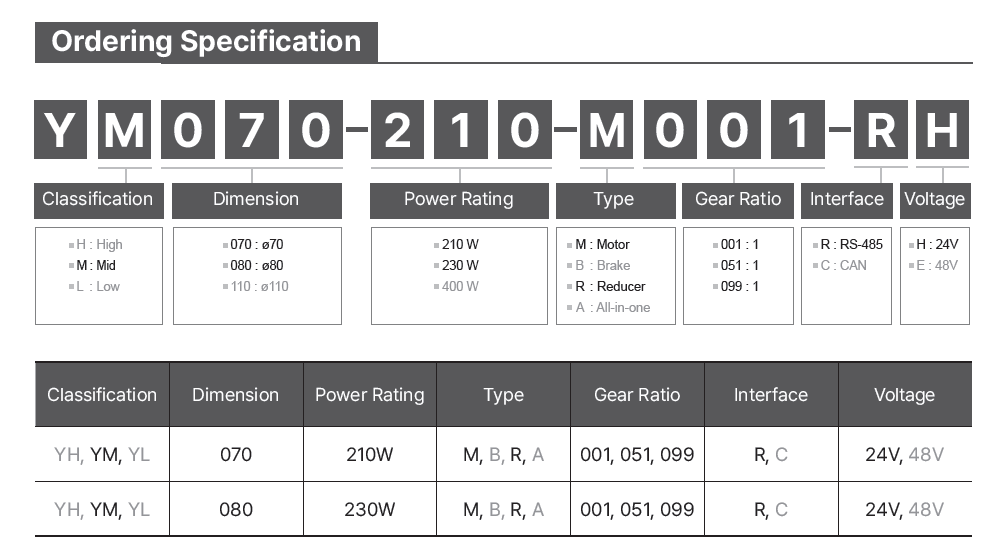
YM080-230-M001-RH
Product Features
- High Performance Frameless motor
- Multi-turn Absolute Encoder
- Compact & Simple Design with Hollow Shaft
- Dynamic Motor Controller
| 商品管理番号 | 902-0201-000 |
|---|---|
| 発売時期 | 2024/04/01 |
| 納期 | 受注生産(約2か月) |
| 購入方法 | お問合せフォームよりお問合せください。 |
商品説明
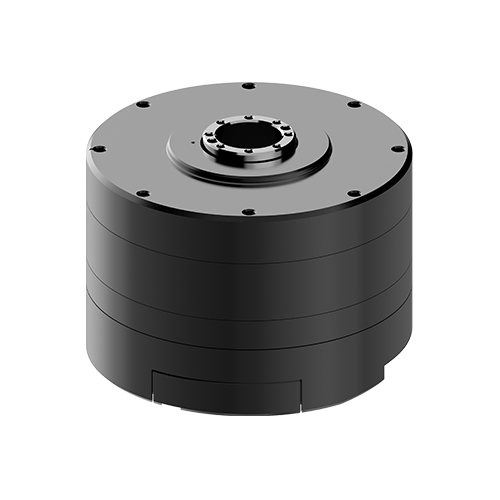
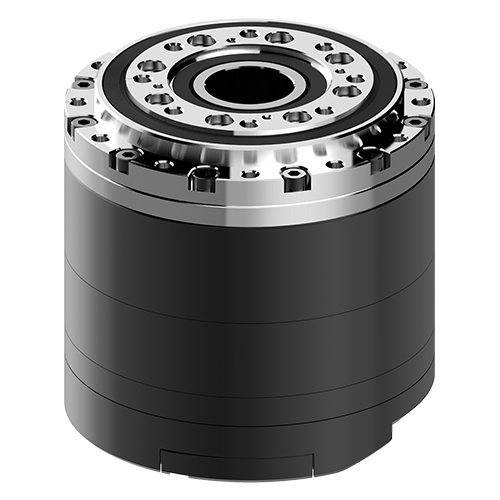
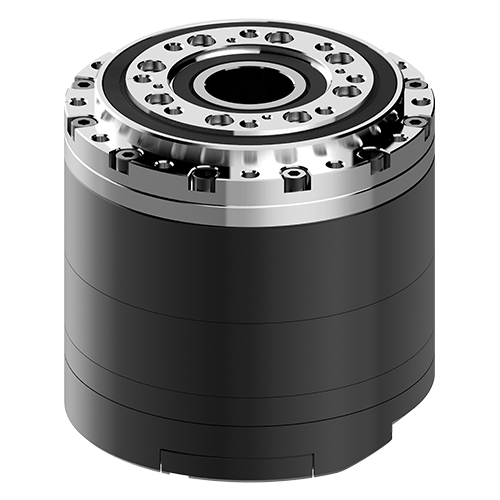
YM080-230-M001-RHには減速機は含まれておりませんので、減速機など様々な製品と組み合わせてご利用いただけます、リニアアクチュエータ・サーボシリンダなど、用途に応じて様々な製品との組み合わせが可能です。
特徴
- 中空シャフトを持つ高性能フレームレスモーター
- 電流検出に基づくトルク制御
- 位置、速度の信頼性と精度を向上させるPID制御
- 統合された絶対磁気エンコーダーと交換可能なバッテリーにより、完全な電源オフ後もマルチターン位置情報を保持(バックアップバッテリー付き)
- 高耐久性のための金属製ハウジング
- モジュラー構成により、自由度の異なるアプリケーションを簡単に作成可能
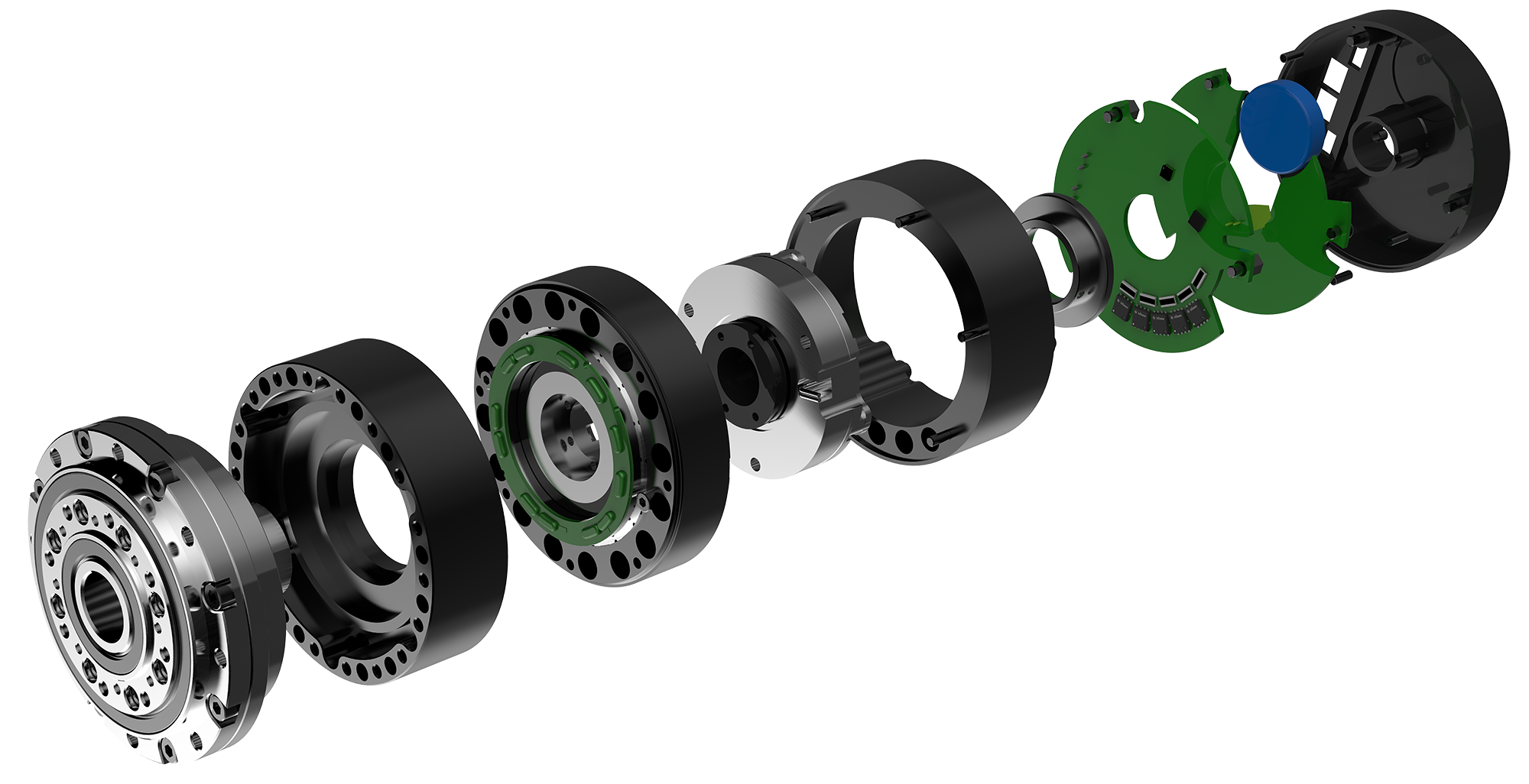
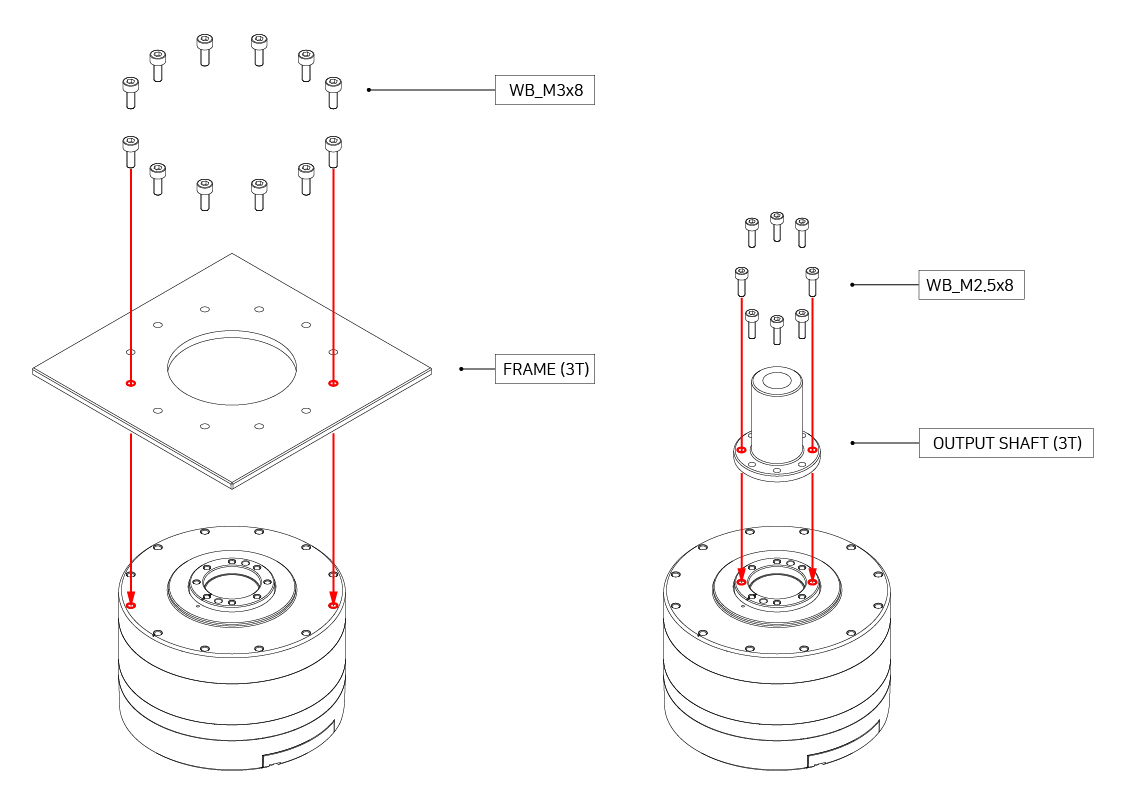
上の画像は理解を助けるためにレデューサーを含めた分解図です。本製品には減速機は含まれておりません。
パッケージ構成
| Products | Qty. | Note |
|---|---|---|
| YM080-230-M001-RH | 1 | DYNAMIXEL-Y(M-option) |
| Robot Cable-2P-X4P 600mm(Convertible) | 1 | RS485 2P-4P Cable(MOLEX-JST) |
| Robot Cable-2P 600mm | 1 | RS485 2P Cable(MOLEX-MOLEX) |
| Cord End Terminal | 4 | For power connection |
| Terminal Plug | 2 | For power connection |
| Wrench Bolt WB M2.5X8 | 10 | For shaft frame assembly |
| Wrench Bolt WB M3x8 | 10 | For frame assembly |
マルチターンバックアップバッテリーの接続方法
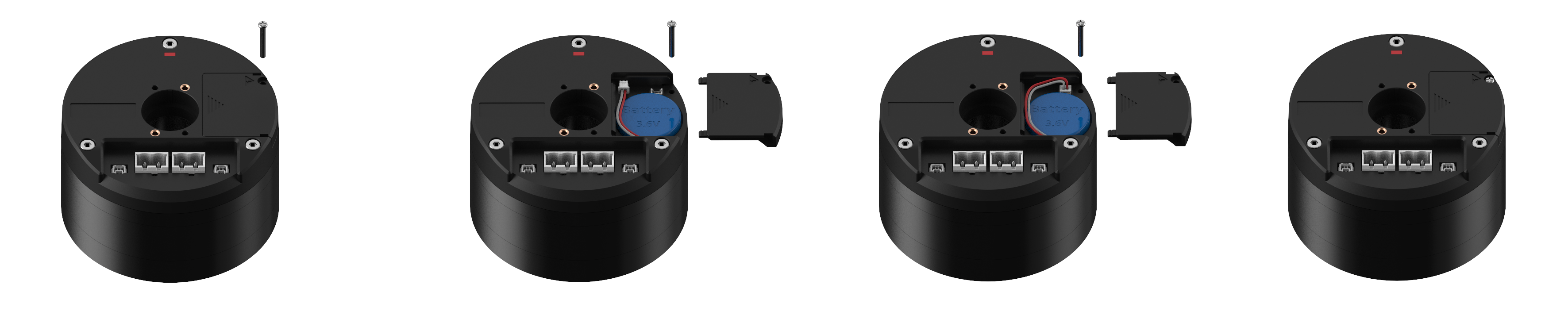
出荷時はマルチターンバックアップバッテリーは本体に接続れていませんのでご注意ください。
使用前にマルチターンバックアップバッテリーを本体に接続して、初期化を行ってください。
- 電源をDYNAMIXEL-Yから切り、バッテリーカバーのロッキングボルトを緩めます。
- バッテリーカバーを開けます。
- バッテリーケーブルを接続します。
- バッテリーカバーを再度取り付けます。
- バッテリーカバーのロッキングボルトを締めて固定します。
- DYNAMIXEL Wizard 2.0を実行し、バッテリー交換手順に従います。
- 詳細については、e-Manualを参照してください。
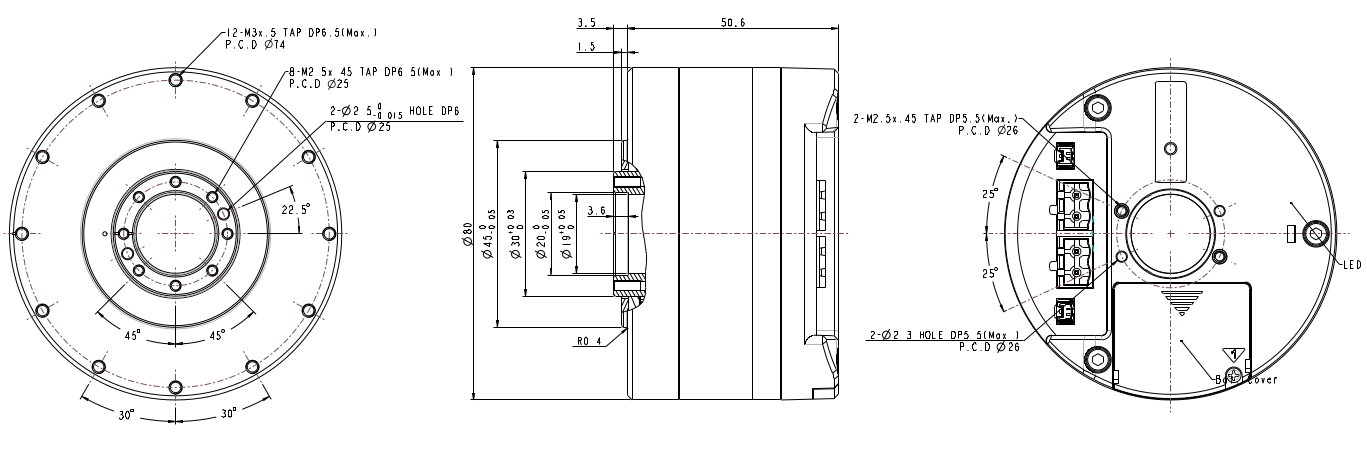
図面
組立ガイド
仕様
| Model Name | YM080-230-M001-RH | |
| Series | DYNAMIXEL Y | |
| MCU | ARM Cortex-M4 (168 [Mhz], 32 [bit]) | |
| Input Voltage | Min. [V] | - |
| Recommended [V] | 24.0 | |
| Max. [V] | - | |
| Performance Characteristics | Voltage [V] | 24.0 |
| Stall Torque [N·m] | - | |
| Stall Current [A] | - | |
| No Load Speed [rpm] | 3,190.0 | |
| No Load Current [A] | - | |
| Continuous Operation | Voltage [V] | 24.0 |
| Torque [N·m] | 0.6 | |
| Speed [rpm] | 2,597.0 | |
| Current [A] | 12.6 | |
| Resolution | Resolution [deg/pulse] | 0.0006866455 |
| Step [pulse/rev] | 524,288 | |
| Angle [degree] | 360 | |
| Position Sensor | Contactless absolute encoder (19Bit, 360 [deg]) Multi-turn (18Bit, 262,144 [rev], Battery back up) | |
| Operating Temperature | Min. [°C] | -5 |
| Max. [°C] | 55 | |
| Motor | Frameless BLDC | |
| Baud Rate | Min. [bps] | 9,600 |
| Max. [bps] | 10,500,000 | |
| Control Algorithm | PID | |
| Gear Type | - | |
| Gear Material | Metal | |
| Case Material | Metal (Plastic Bottom) | |
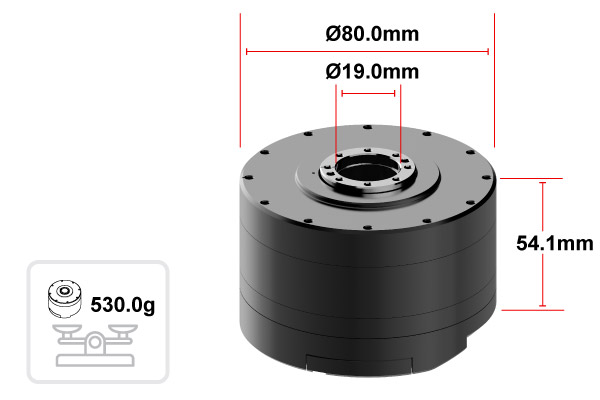
| Dimensions (WⅹHⅹD) [mm] | D80 x 54.1 | |
| Dimensions (WⅹHⅹD) [inch] | D3.14 x 2.12 | |
| Weight [g] | 530.00 | |
| Weight [oz] | 18.70 | |
| Gear Ratio | 1:1 | |
| Backlash [arcmin] | - | |
| Backlash [deg] | - | |
| Command Signal | Digital Packet | |
| Protocol Type | Half duplex Asynchronous Serial Communication (8bit, 1stop, No Parity) | |
| Link (Physical) | RS-485 Multidrop Bus | |
| ID | 0 ~ 252 | |
| Feedback | Position, Velocity, Current, Temperature, Voltage, etc | |
| Protocol version | Protocol 2.0 | |
| Operating Mode / Angle | Current Control mode:Endless turn Velocity Control mode:Endless turn Position Control Mode : ±131,072 [Rev] | |
| Output [W] | 230 | |
| Standby Current [mA] | 40 | |
Link