OpenMANIPULATOR-X 組立キット
Low-Cost Manipulator for ROS and Arduino
| 注意事項 | この商品は組立キットです。 |
|---|
特徴
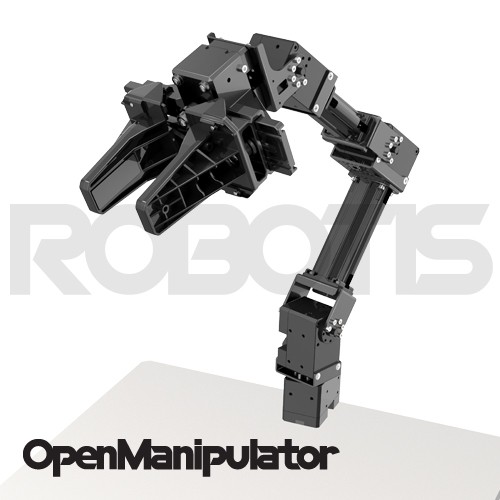
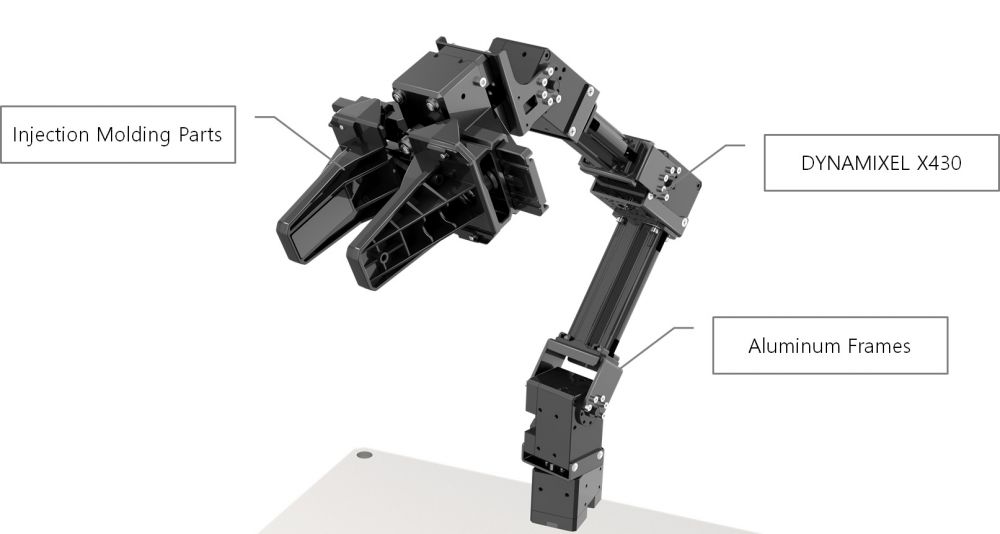
OpenMANIPULATOR-X(モデル名: RM-X52-TNM)は、ROSに基づくコンパクトなオープンソースロボットアームの組立キットです。
-
高いペイロードの実現
DYNAMIXEL XM-430モデルを採用しており、コンパクトながら高いペイロードを実現しています。
-
優れた拡張性と互換性
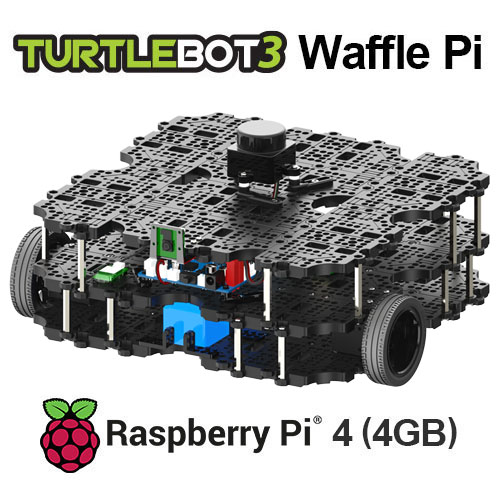
PCやOpenCRなどのコントローラを自由に選択して使用可能です。また、TB3 Waffle Piなどのモバイルプラットフォームでも簡単に使用できます。
-
充実した開発環境
TB3 Waffle Piとすぐに操作できるように、ソースコードと開発環境があらかじめ提供されています。
セット内容
【重要】組み立てに関するご注意
この商品は組立キットです。ユーザー自身が組立てを行う必要があります。
この商品は組立キットです。ユーザー自身が組立てを行う必要があります。
| お届け内容 | 数量 | 備考 / 仕様 |
|---|---|---|
| XM430-W350-T | 5個 | DYNAMIXEL サーボモータ |
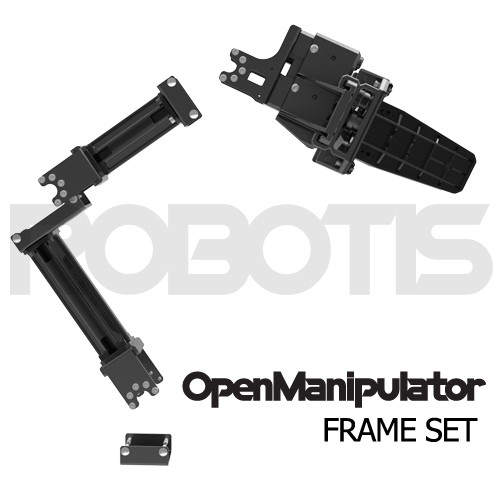
| Exclusive Plastic Frame Set | 1個 | 専用プラスチックフレームセット |
| FR12-H101K | 2個 | フレームパーツ |
| FR12-H104K | 1個 | フレームパーツ |
| FR12-S101K | 1個 | フレームパーツ |
| FR12-S102K | 2個 | フレームパーツ |
| HN12-I101 Set | 3個 | |
| Robot Cable Set X3P (by length) | 5個 | ロボットケーブルセット |
| Bolt & Nut Set | 1個 | ボルト・ナットセット |
| Rubber Pad (Finger Tip) | 2種×2 | 指先用ラバーパッド |
| Phillips Screwdriver | 1個 | プラスドライバー |
| Allen Wrench (by type) | 3個 | 六角レンチ(タイプ別) |
仕様
| DYNAMIXEL (Servo Motor) |
XM430-W350-T |
| 自由度 (Degree of Freedom) |
5 (4DOF + 1DOF Gripper) |
| 可搬重量 (Payload) |
500g |
| 関節速度 (RPM joint) |
46RPM |
| 総重量 (Weight assembly) |
700g |
| 全長 (Length) |
380mm |
| グリッパーストローク (Gripper stroke) |
20 ~ 75mm |
| 通信インターフェース (Interface) |
TTL Level Multi Drop BUS |
| 対応ソフトウェア (Software) |
ROS, DYNAMIXEL SDK, Arduino, Processing |
別売りオプション
本製品を動作させるためには、以下の別売り周辺機器(電源、コントローラ、インターフェースなど)が別途必要です。
| 項目 | 対応周辺機器(別売) |
|---|---|
| Power Supply(電源) | SMPS 12V 5A, U2D2 Power Hub Board (供給電圧: 12V) |
| Controller(コントローラ) | OpenCR または PC (TB3コントローラーと電源に対応) |
| Interface(インターフェース) | U2D2 |
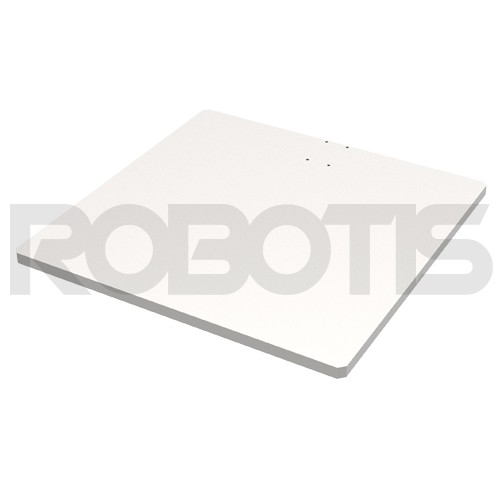
| Etc.(その他) | Base Plate-02 (専用ベースプレート) |
注意事項
-
電源・コントローラーについて
本製品に電源、コントローラーは付属しておりません。別途お買い求めください。なお、TB3コントローラーと電源に対応しています。
-
組立説明書について
紙の組立説明書は付属しておりません。オンラインでPDFファイルを無料でダウンロードしてご確認ください(下記Link参照)。